Q250 조립 가이드
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo
패스너 크기
조립하는 동안 다양한 크기의 나사와 랙이 사용되며 잘못된 크기의 패스너를 사용하면 콥터가 손상될 수 있습니다.

나사 M3x10

알루미늄 랙 40mm

나사 M3x8
알루미늄 랙 15mm

나사 M3x5

나일론 랙 40mm

나사 M2x5

나일론 랙 30mm

너트 M3(자동 잠금)

나일론 랙 20mm

너트 M3(나일론)

나일론 랙 15mm

댐퍼 랙
나일론 랙 6mm
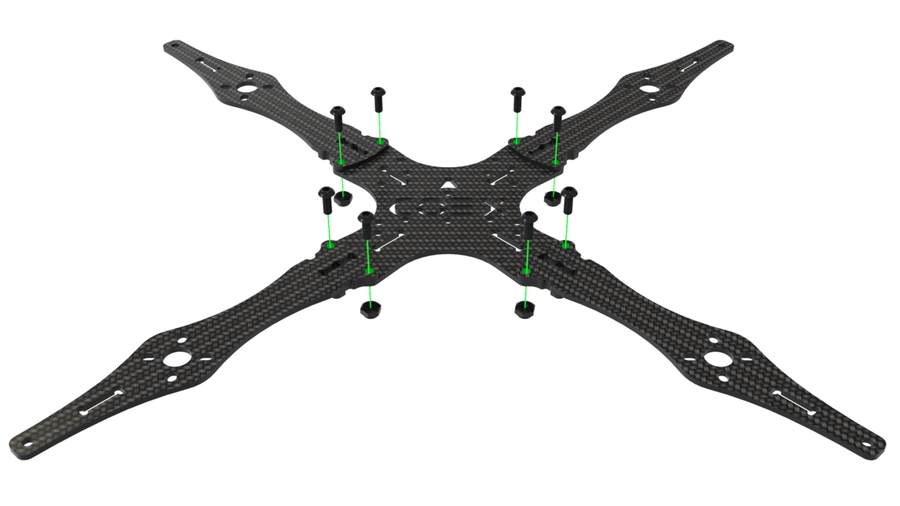
프레임 조립
4개의 빔을 중앙 데크에 정렬하고 나일론 인서트가 있는 M3x8 나사와 너트로 고정합니다.

메인 데크의 중앙 구멍에 2개의 알루미늄 15mm 포스트를 설치하고 M3x8 나사로 고정합니다.

보의 홈에 보강재 후크를 설치합니다.

메인 데크에 보강재를 누릅니다.

작은 카본 데크로 보강재를 조입니다.

4개의 6mm 나일론 포스트를 설치하고 M3x5 나사로 고정합니다.

모터 설치
모터를 설치할 때 모터의 회전 방식에 주의하십시오. 모터의 회전 표시는 회전 패턴과 일치해야 합니다.

M3x5 나사를 사용하여 빔의 해당 구멍에 모터를 장착합니다 .


모터가 M3x5 나사로 고정되어 있는지 확인하십시오. 그렇지 않으면 권선 사이에 단락이 발생할 수 있습니다.
ESC 및 PDB 설치
MR30 커넥터를 사용하여 속도 컨트롤러(ESC)를 모터에 연결하고 클램프를 사용하여 빔에 고정합니다.


사전 장착된 랙에 배전반(PDB)을 설치하고 6mm 랙으로 고정합니다. 배전반은 전원 연결 케이블이 기체의 꼬리 쪽을 향하도록 설치해야 합니다.

속도 컨트롤러의 전원 출력을 배전반에 연결합니다.

비행 컨트롤러 설치
Clover 4 드론 키트를 사용하면 COEX Pix 및 Pixracer와 같은 다양한 비행 컨트롤러를 설치할 수 있습니다 .
비행 컨트롤러를 설치하는 동안 보드에 있는 화살표에 주의하십시오. 화살표는 콥터 선수를 향해야 합니다.
코엑스 픽스
댐퍼 스트러트를 설치하기 전에 2겹의 나일론 너트를 조여 더 강하게 고정하거나 사이드 커터를 사용하여 여분의 실을 잘라냅니다.
댐퍼 스트럿을 설치하고 나일론 너트로 COEX Pix를 고정하십시오.

픽스레이서
작은 데크를 랙에 놓고 나일론 너트로 고정합니다.

양면 테이프를 3~4겹 붙이고 작은 데크 중앙에 붙이고 그 위에 Pixracer를 설치합니다.

비행 컨트롤러 연결
다이어그램에 따라 속도 컨트롤러를 비행 컨트롤러에 연결합니다.
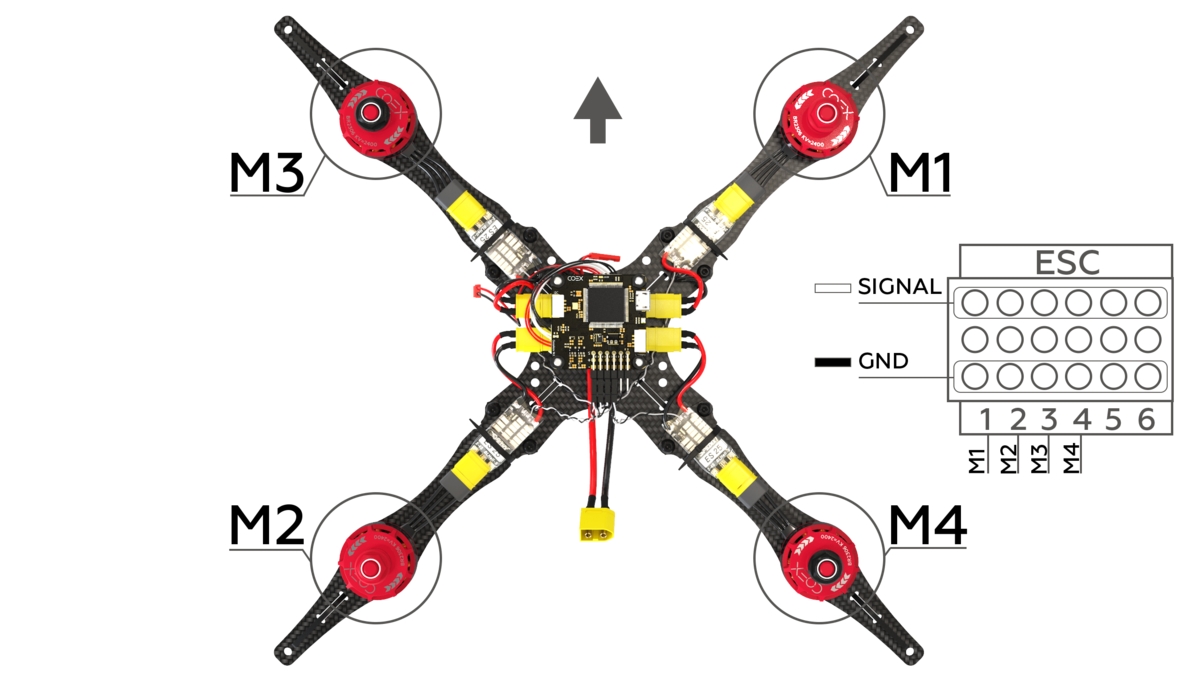
전원 케이블을 배전반(PDB)과 비행 컨트롤러의 해당 커넥터에 연결합니다.

M3x10 나사에 40mm 알루미늄 랙을 설치합니다.


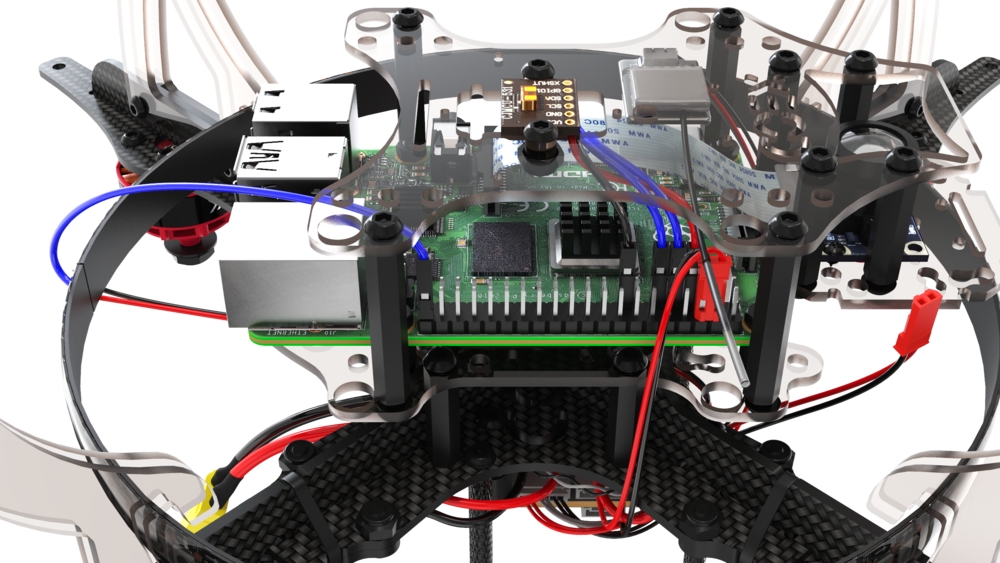
라즈베리 파이 설치
메인 데크에 20mm 랙을 설치하고 M3x8 나사로 고정합니다.


마운팅 데크에 M2.5x6mm 랙과 M3x30mm 랙을 설치하고 각각 M2.5x4 및 M3x10 볼트로 고정합니다.

조립된 마운팅 데크를 메인 데크에 설치하고 M3x8 나사로 고정합니다.

Raspberry Pi 회로 기판을 설치하고 M2.5x4 볼트로 고정합니다.

캡처 데크에 자동 잠금 너트와 M3x8 나사를 사용하여 거리계를 설치하고 양면 테이프를 사용하여 무전기를 붙입니다.

4개의 20mm 랙을 설치하고 M3x8 나사로 고정합니다.
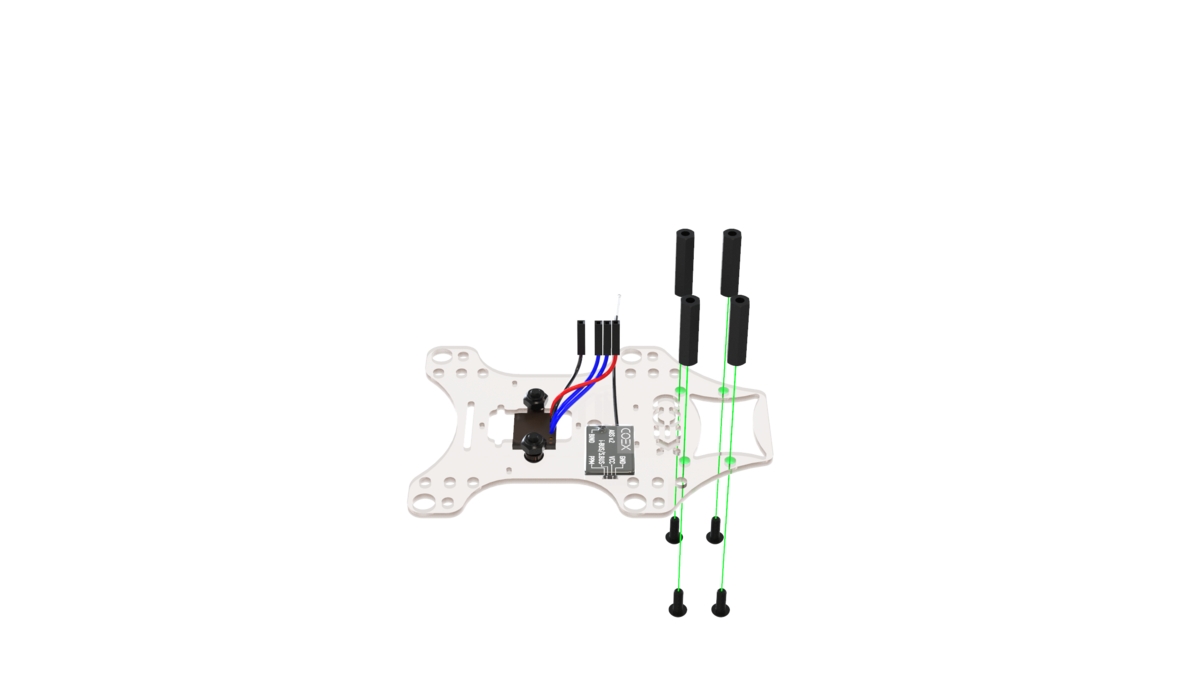
작은 마운팅 데크에 카메라를 설치하고 왼쪽 상단과 오른쪽 하단 모서리에 2개의 M2x5 셀프 태핑 나사로 고정합니다.

캡처 데크에 카메라 모듈을 설치하고 M3x8 나사로 고정합니다.

조립된 픽업 데크를 설치하고 M3x8 나사로 고정합니다.

Raspberry Pi 거리 측정기와 전원 케이블을 연결합니다.

카메라 케이블을 Raspberry Pi에 연결합니다.

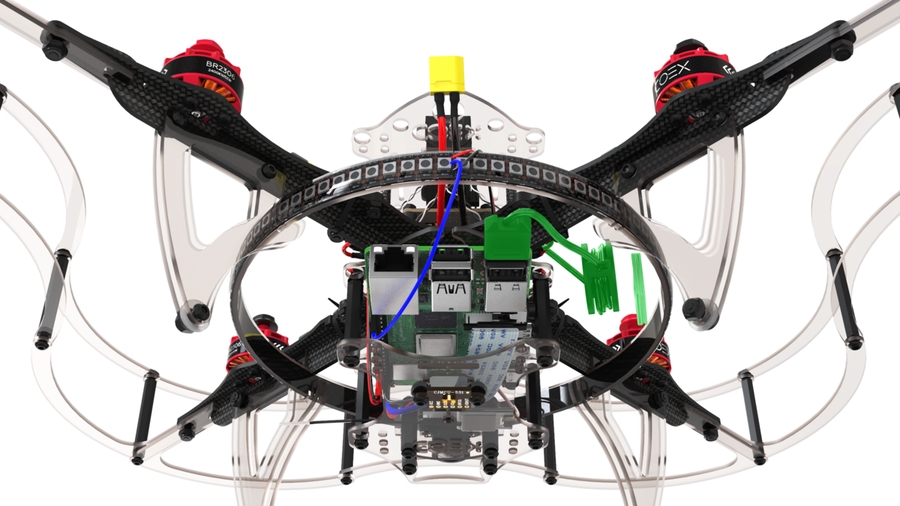
LED 스트립 및 다리 설치
끝의 잠금 장치를 결합하여 LED 스트립용 후프를 조립합니다.

더 나은 고정을 위해 후프에 LED 스트립을 붙이고 3-4 개의 클램프로 당깁니다.

맨 끝의 장착 구멍만 사용하여 자동 잠금 너트와 M3x8 나사를 사용하여 보강판에 다리를 설치합니다. 아래에서 다리 판 사이에 댐퍼 실리콘 링을 설치하십시오.

다리를 뒤로 구부리고 LED 스트립이 있는 후프를 특수 홈에 설치하여 연결 케이블이 콥터의 꼬리 쪽에서 나오도록 합니다.

뒤에 자동 잠금 너트와 M3x10 나사로 다리를 고정하십시오.

LED 스트립 전원(빨간색, 검은색 케이블)을 PDB의 짧은 JST 커넥터에 연결합니다.

LED 스트립(흰색 케이블)의 신호 출력을 Raspberry Ri의 GPIO21 핀에 연결합니다 .
가드 설치
40mm 랙과 M3x10 나사로 하단 가드를 조립합니다.

M3x10 나사로 최고 수준의 보호 장치를 조립하십시오.

마운팅 데크를 설치하고 M3x8 볼트로 고정합니다.

자동 잠금 너트와 M3x10 나사를 사용하여 빔을 보호하고 고정합니다.

비행 준비
배터리 스트랩을 설치하고 USB 케이블을 사용하여 비행 컨트롤러를 Raspberry Pi에 연결합니다.

모터 방향 다이어그램 에 따라 프로펠러를 설치하십시오 .

배터리를 설치합니다.

드론이 조립된 후 설정을 수행합니다 .
Last updated