Pre-Arm 안전 점검
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
ArduPilot에는 누락된 보정, 구성 또는 잘못된 센서 데이터를 포함하여 상당히 많은 수의 문제가 이동 전에 발견되는 경우 차량이 추진 시스템을 무장하는 것을 방지하는 사전 암 안전 검사 제품군이 포함되어 있습니다. 이러한 검사는 충돌이나 날아가는 것을 방지하는 데 도움이 되지만 필요한 경우 비활성화할 수도 있습니다.
GCS를 사용하여 어떤 Pre-Arm Check가 실패했는지 인식
조종사는 차량을 무장할 수 없고 알림 LED(사용 가능한 경우)가 노란색으로 깜박이기 때문에 사전 무장 점검 실패를 알 수 있습니다. 정확히 어떤 검사가 실패했는지 확인하려면 다음을 수행하십시오.
USB 케이블 또는 Telemetry를 사용하여 Autopilot을 지상국에 연결합니다 .
GCS가 차량에 연결되어 있는지 확인합니다(예: Mission Planner에서 우측 상단의 "연결" 버튼 누름).
라디오 송신기를 켜고 차량 준비를 시도하십시오(일반적인 절차는 스로틀 다운, 오른쪽 요우 또는 RCx_OPTION 스위치를 사용하는 것입니다).
Pre-Arm Check 실패의 첫 번째 원인이 HUD 창에 빨간색으로 표시됩니다.
실패한 사전 준비 확인도 약 30초마다 준비 해제된 상태에서 GCS에 메시지로 전송됩니다. 이것을 비활성화하고 시도 암이 실패할 때만 전송되도록 하려면 ARMING_OPTIONS 비트 1(값 1)을 설정하십시오.
실패 메시지
Failsafe:
Failsafe 안전 장치(RC, 배터리, GCS 등)는 메시지를 표시하고 무장을 방지합니다.
RC failures:
RC 미교정 : 라디오 교정이 수행되지 않았습니다. RC3_MIN , RC3_MAX는 기본값(1100, 1900)에서 변경되어야 하며, 채널 1~4는 MIN 값이 1300 이하, MAX 값이 1700 이상이어야 합니다.
Barometer failures:
Baro not healthy : 기압계 센서가 일반적으로 하드웨어 오류의 징후인 비정상이라고 보고합니다.
Alt disparity : 기압계 고도가 관성 항법(예: Baro + Accelerometer) 고도 추정치와 1미터 이상 일치하지 않습니다. 이 메시지는 일반적으로 수명이 짧으며 자동조종 장치가 처음 연결되거나 강한 충격(예: 갑자기 떨어짐)을 받는 경우 발생할 수 있습니다. 지워지지 않으면 가속도계를 보정해야 하거나 기압계 하드웨어 문제일 수 있습니다.
Compass failures:
Compass not healthy : 나침반 센서가 하드웨어 오류의 징후인 비정상이라고 보고합니다.
Compass not calibrated : 나침반이 보정되지 않았습니다 . 매개 변수가 0이거나 연결된 나침반의 수 또는 유형이 마지막 나침반 보정이 수행된 이후 변경되었습니다.COMPASS_OFS_X, _Y, _Z
Compass offsets too high : 기본 나침반의 오프셋 길이(예: sqrt(x^2+y^2+z^2))가 500보다 큽니다. 이것은 금속 물체가 나침반에 너무 가깝게 배치되어 발생할 수 있습니다. 내부 나침반만 사용하는 경우(권장하지 않음) 단순히 큰 오프셋을 일으키는 보드의 금속일 수 있으며 실제로 문제가 되지 않을 수 있으며 이 경우 나침반 확인을 비활성화할 수 있습니다.
Check mag field : 영역에서 감지된 자기장이 예상 값보다 35% 높거나 낮습니다. 예상 길이는 530이므로 > 874 또는 < 185입니다. 자기장 강도는 전 세계적으로 다양하지만 이러한 넓은 한계는 나침반 보정이 좋은 오프셋을 계산하지 못했고 반복해야 할 가능성이 더 높다는 것을 의미합니다.
Compasses inconsistent : 내부 및 외부 나침반이 서로 다른 방향을 가리키고 있습니다(45도 초과). 이는 일반적으로 외부 나침반 방향(예: COMPASS_ORIENT 매개변수)이 잘못 설정되어 발생합니다.
GPS related failures:
GPS Glitch : GPS에 결함이 있고 차량이 GPS가 필요한 비행 모드(예: Loiter, PosHold 등) 및/또는 원통형 펜스 가 활성화되어 있습니다.
Need 3D Fix : GPS에 3D 수정이 없고 차량이 GPS 및/또는 원통형 울타리가 활성화되어야 하는 비행 모드에 있습니다.
Bad Velocity : 차량의 속도(관성 항법 시스템 기준)가 50cm/s 이상입니다. 이를 유발할 수 있는 문제에는 차량이 실제로 움직이거나 떨어지는 것, 잘못된 가속도계 보정, 예상되는 5hz 미만의 GPS 업데이트가 포함됩니다.
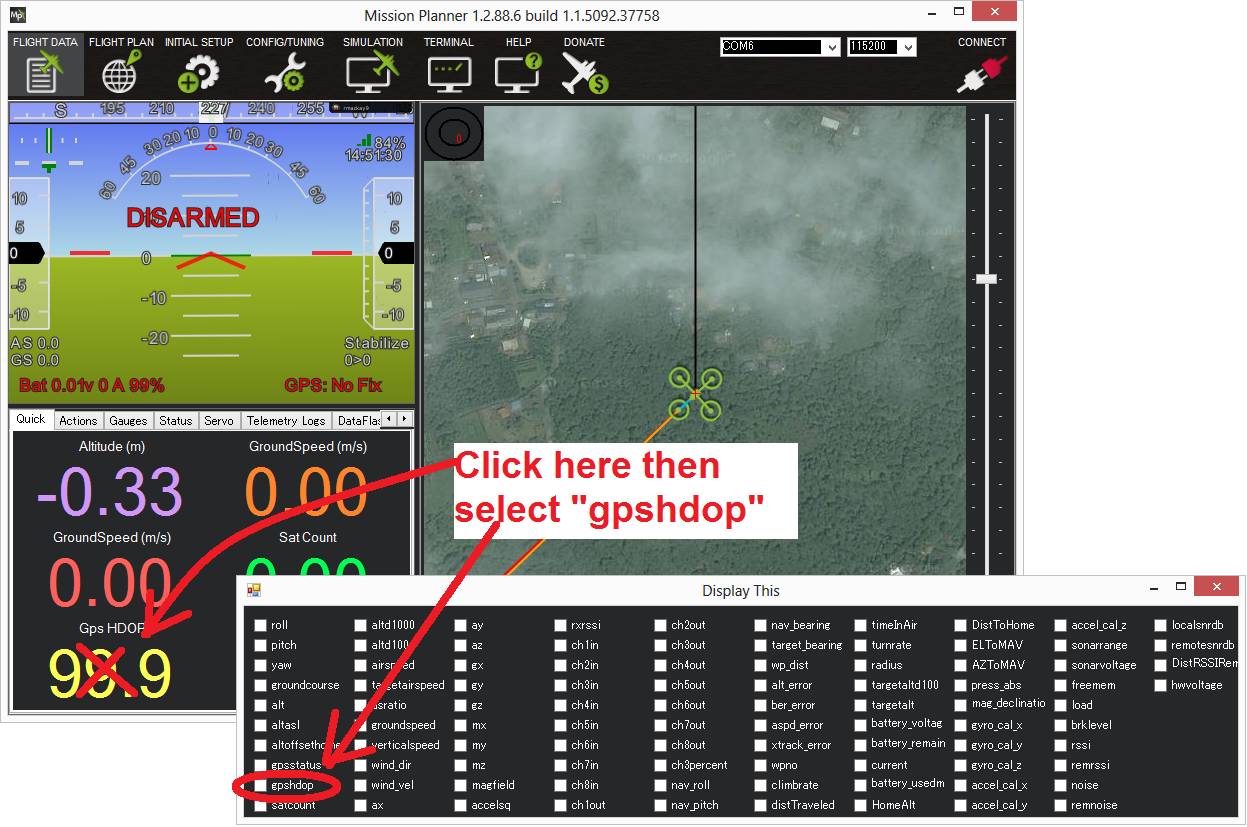
High GPS HDOP : GPS의 HDOP 값(위치 정확도 측정)이 2.0 이상이고 차량이 GPS가 필요한 비행 모드에 있거나 원통형 울타리가 활성화 되어 있습니다. 이것은 단순히 몇 분을 기다리거나, 하늘이 더 잘 보이는 위치로 이동하거나, GPS 간섭 소스(즉, FPV 장비)가 GPS에서 더 멀리 이동했는지 확인함으로써 해결할 수 있습니다. 또는 GPS_HDOP_GOOD 매개변수를 2.2 또는 2.5로 늘려 검사를 완화할 수 있습니다 . 최악의 경우 조종사는 GPS를 필요로 하지 않는 모드(예: Stabilize, AltHold)에서 펜스 및 이륙을 비활성화하고 무장 후 Loiter로 전환할 수 있지만 권장되지 않습니다.
참고: GPS HDOP는 아래와 같이 Mission Planner의 Quick 탭을 통해 쉽게 볼 수 있습니다.
INS 검사(예: 가속도계 및 자이로 검사):
INS not calibrated : 가속도계 오프셋의 일부 또는 전부가 0입니다. 가속도계 를 보정해야 합니다 .
Accels not healthy : 가속도계 중 하나가 하드웨어 문제일 수 있는 정상이 아니라고 보고합니다. 이는 보드가 다시 시작되기 전에 펌웨어 업데이트 직후에도 발생할 수 있습니다.
Accels inconsistent : 가속도계가 최소 1m/s/s 차이가 나는 가속도를 보고합니다. 가속도계 를 다시 보정해야 하거나 하드웨어 문제가 있습니다.
Gyros not healthy : 자이로스코프 중 하나가 하드웨어 문제일 가능성이 있는 비정상 상태라고 보고합니다. 이는 보드가 다시 시작되기 전에 펌웨어 업데이트 직후에도 발생할 수 있습니다.
Gyro cal failed : 자이로 보정이 오프셋을 캡처하지 못했습니다. 이것은 자이로 캘리브레이션(빨간색과 파란색 표시등이 깜박일 때) 동안 차량이 움직이기 때문에 가장 자주 발생하며, 이 경우 배터리를 뽑았다가 다시 꽂으면서 차량을 밀지 않도록 주의하면 문제가 해결될 가능성이 높습니다. 센서 하드웨어 장애(예: 스파이크)도 이 장애를 일으킬 수 있습니다.
Gyros inconsistent : 두 개의 자이로스코프가 차량 회전 속도가 20deg/sec 이상 차이가 난다고 보고합니다. 이는 하드웨어 오류이거나 잘못된 자이로 보정으로 인한 것일 수 있습니다.
보드 전압 확인:
Check Board Voltage : 보드의 내부 전압이 4.3볼트 미만이거나 5.8볼트 이상입니다.
USB 케이블을 통해 전원을 공급받는 경우(예: 벤치에 있는 동안) 이는 데스크톱 컴퓨터가 자동 조종 장치에 충분한 전류를 제공할 수 없기 때문에 발생할 수 있습니다. USB 케이블을 교체해 보십시오.
배터리로 전원을 공급받는 경우 이는 심각한 문제이며 전원 시스템(예: 파워 모듈, 배터리 등)을 비행하기 전에 주의 깊게 확인해야 합니다.
매개변수 확인:
Ch7&Ch8 Opt cannot be same : 보조 기능 스위치는 혼동을 일으킬 수 있으므로 허용되지 않는 동일한 옵션으로 설정됩니다.
Check FS_THR_VALUE : 무선 안전 장치 pwm 값이 스로틀 채널(예: ch3) 최소값에 너무 가깝게 설정되었습니다.
Check ANGLE_MAX : 차량의 최대 경사각을 제어하는 ANGLE_MAX 매개변수가 10도 미만(예: 1000) 또는 80도 이상(예: 8000)으로 설정되었습니다.
ACRO_BAL_ROLL/PITCH : ACRO_BAL_ROLL 매개변수가 Stabilize Roll P 값보다 높거나 ACRO_BAL_PITCH 매개변수가 Stabilize Pitch P 값보다 높습니다. 이로 인해 Acro Trainer 안정화가 조종사의 입력을 압도하기 때문에 조종사가 ACRO 모드에서 기울기 각도를 제어할 수 없게 될 수 있습니다.
배터리/전원 모니터:
전원 모니터 전압이 비상 안전 저전압 또는 임계 전압 또는 비상 안전 잔여 용량 저 또는 임계 설정값 미만인 경우 이 검사는 실패하고 아래에 있는 설정값을 표시합니다. 또한 이러한 설정 포인트가 반전되면, 즉 임계 포인트가 낮은 포인트보다 높은 경우에도 실패합니다. 이에 대한 자세한 내용은 헬리콥터용 배터리 안전 장치 , 비행기용 비행기 안전 장치 또는 로버용 안전 장치를 참조하십시오 .
또한 각 배터리/전원 모니터에 대한 최소 활성화 전압 및 남은 용량 매개변수를 설정할 수 있습니다(예: 첫 번째 배터리의 BATT_ARM_VOLT 및 BATT_ARM_MAH) . 작업.
속도:
대기 속도 센서가 구성되어 있고 판독값을 제공하지 않거나 보정에 실패한 경우 이 검사는 실패합니다.
로깅:
Logging failed : 사전 준비 로깅이 활성화되었지만 로그에 쓰지 못했습니다.
No SD Card : 로깅이 활성화되었지만 SD 카드가 감지되지 않습니다.
안전 스위치:
Hardware safety switch : 하드웨어 안전 스위치가 눌리지 않았습니다.
체계:
Param storage failed : 파라미터 저장 영역 읽기 확인에 실패했습니다.
Internal errors (0xx) : 내부 오류가 발생했습니다. 여기에서 ArduPilot 개발 팀에 보고하십시오.
KDECAN Failed : KDECAN 시스템 오류입니다.
DroneCAN Failed : DroneCAN 시스템 오류입니다.
임무비행:
No mission library present : 미션 확인이 활성화되었지만 미션이 로드되지 않았습니다.
No rally library present : 랠리 포인트 확인이 활성화되었지만 로드된 랠리 포인트가 없습니다.
Missing mission item: xxxx : 필수 미션 아이템이 누락되었습니다.
Rangefinder:
거리계가 구성된 경우 보고 오류가 발생한 것입니다.
Pre-Arm 안전 확인 비활성화
경고
사전 암 안전 확인을 비활성화하는 것은 권장되지 않습니다. 프리암 고장의 원인은 가능하면 차량을 운행하기 전에 수정해야 합니다. 사전 준비 검사 실패가 실제 문제가 아니라고 확신하는 경우 실패한 검사를 비활성화할 수 있습니다.
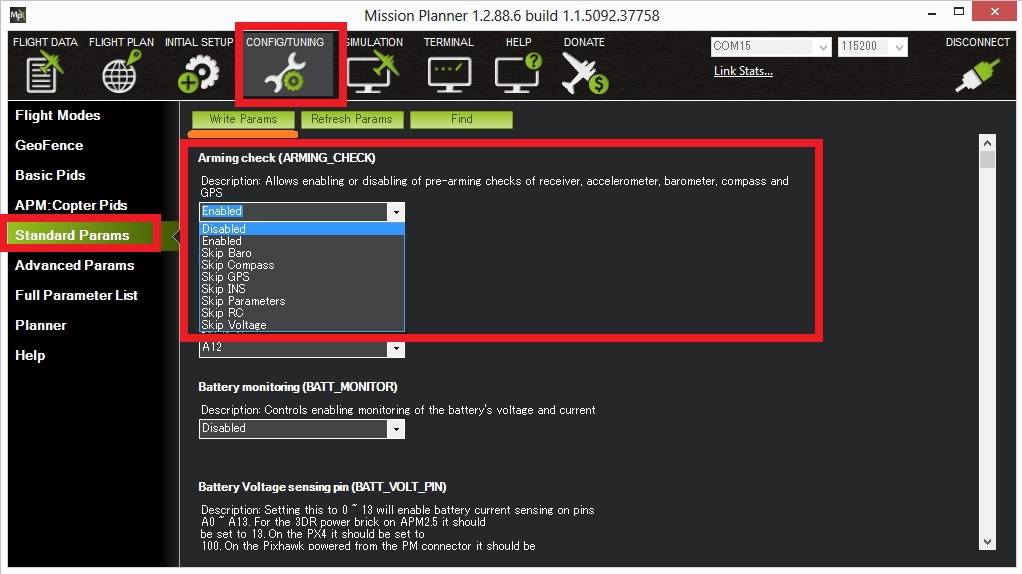
준비 검사는 ARMING_CHECK 매개변수를 1 이외의 값 으로 설정하여 개별적으로 비활성화할 수 있습니다. 0으로 설정하면 모든 사전 준비 검사가 완전히 제거됩니다. 예를 들어 4로 설정하면 GPS가 잠겨 있는지만 확인합니다.
Mission Planner를 사용하여 구성할 수도 있습니다.
미션 플래너에 오토파일럿 연결하기
Mission Planner의 Config/Tuning >> Standard Params 화면으로 이동합니다.
Arming Check 드롭다운을 "Disabled" 또는 "Skip" 옵션 중 하나로 설정하여 오류를 일으키는 항목을 더 효과적으로 건너뜁니다.
"매개 변수 쓰기" 버튼을 누릅니다.
Last updated