Mission Planner에서 비행 데이터 로그 다운로드 및 분석
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
Dataflash 로그는 자동 조종 장치에 저장되며 비행 후 다운로드할 수 있습니다. 기본적으로 차량을 처음 무장한 후에 생성됩니다. 이 항목에서는 Dataflash 로그를 구성하고 액세스하는 방법을 설명합니다.
자동 조종 장치 유형 및 구성에 따라 데이터 플래시 로그는 SD 카드, 데이터 플래시 칩에 저장되거나 MAVLink 원격 측정 포트를 통해 스트리밍될 수 있습니다. MAVLink 옵션에는 일반적으로 921600 보드의 고속 원격 측정 포트가 필요합니다.
메모
원격 분석 로그 ("tlog"라고도 함)는 dataflash 로그와 유사한 정보를 수집합니다(자세한 내용은 로그를 사용하여 문제 진단 참조).
악명 높은 "IO 하트비트 없음" 진단 메시지를 포함하여 차량에서 데이터 플래시 로그를 생성하는 데 문제가 있는 경우 다른 SD 카드를 사용해 보십시오. H2testw와 같은 전용 도구를 사용하여 카드를 테스트하도록 선택할 수도 있습니다. 낮은 보드 전압도 로깅 문제를 일으키는 것으로 알려져 있습니다.
로깅 매개변수
일반적으로 사용되는 일부 매개변수는 다음과 같습니다.
LOG_BACKEND_TYPE : 로그를 저장할 위치에 대한 비트마스크입니다. 일반적인 값은 로깅을 비활성화하는 "0", SD 카드 파일에 기록하는 "1"(비트 0 설정), MAVLink를 통해 스트리밍하는 "2"(비트 1 설정), 보드에 기록하는 "4"(비트 2 설정)입니다. 데이터 플래시 메모리(장착된 경우).
LOG_BITMASK : 기록되는 항목에 대한 비트마스크입니다. 일반적으로 기본값을 사용하거나 "0"을 사용하여 로깅을 비활성화합니다.
LOG_DISARMED : 1로 설정하면 차량의 첫 번째 무장이 아닌 전원이 공급될 때 로깅을 시작합니다. 사전 준비 오류를 디버깅할 때 유용합니다. 2로 설정하면 벤치에 설치하는 동안 로깅을 방지하기 위해 USB 전원 이외의 전원 응용 프로그램에만 로그온합니다. 3(권장)으로 설정하면 차량이 무장 상태로 진행하지 않는 모든 로그도 지워집니다. 이렇게 하면 벤치나 현장에서 구성하는 동안 수많은 로그가 축적되는 것을 방지할 수 있습니다. 로깅이 해제된 동안 로그 파일 크기를 관리하려면 LOG_DARM_RATEMAX 도 참조하십시오.
LOG_FILE_DSRMROT : 이 비트를 설정하면 해제 후 15초 동안 기다린 후 다시 설정한 후 새 로그 파일을 강제로 생성합니다. 일반적으로 로그는 첫 번째 아밍에서 시작하여 자동 조종 장치의 전원 주기마다 하나의 파일이 됩니다.
LOG_FILE_MB_FREE : 이 매개변수는 로깅이 시작되기 전에 로깅 미디어의 최소 여유 공간을 설정합니다. 이를 사용할 수 없는 경우 초기화 중에 이를 제공하기 위해 이전 로그가 삭제됩니다. 기본값은 500MB입니다.
LOG_FILE_RATEMAX : 스트리밍 로그 메시지가 파일 크기를 제한하기 위해 파일 백엔드에 기록되는 최대 속도를 설정합니다. 값이 0(기본값)이면 SCHED_LOOP_RATE 값(50Hz: 비행기, 300Hz: QuadPlane/Rover, 400Hz: 헬리콥터, 보통)에따라 정상 로깅에 제한이 적용되지 않음을 의미합니다마찬가지로 LOG_BLK_RATEMAX 및 LOG_MAV_RATEMAX는 각각 BLOCK 로깅 및 MAVLink 로깅 스트림에 대해 동일한 선택적 제한을 수행합니다.
메모
과도한 로깅 속도로 인해 로깅 항목이 누락된 것으로 의심되는 경우 DSF.Dp 로그 메시지에서 누락된 항목의 양을 확인할 수 있습니다.
자세, 센서 등과 같은 지속적으로 스트리밍되는 로그 메시지의 로깅은 RCx_OPTION송신기 채널에서 보조 기능 "164"를 사용하여 일시 중지할 수 있습니다. 이 채널을 높음으로 전환하면 이러한 메시지가 일시 중지되지만 이벤트, 모드 변경, 경고 등은 일시 중지되지 않습니다. 이렇게 하면 로깅 기능이 제한된 자동 조종 장치(즉, 칩 메모리에 블록 로깅을 사용하고 SD 카드 없음)가 비행 중 원하는 경우에만 로깅할 수 있습니다. 조정 단계 또는 TEC 매개변수 결정 중 등. 로그 크기를 줄이기 위해 LOG_BITMASK를 사용하여 불필요한 로그 메시지를 제거할 수도 있습니다.
리플레이 로깅
ArduPilot은 EKF/AHRS 문제에 대한 솔루션을 실제로 코드 변경에 대한 로그를 재생하여 원하는 대로 수정된 동작이 발생하는지 확인하여 보다 쉽게 확인할 수 있는 방식으로 로그인할 수 있습니다. 이를 위해서는 작업할 문제를 보여주는 로그가 무장 해제 기간( LOG_DISARMED 가 0이 아닌 값, 바람직하게는 3으로 설정됨) 및 LOG_REPLAY =1 동안 로깅이 활성화된 상태로 만들어져 정상보다 더 많은 센서 데이터를 로깅해야 합니다.
온보드 DataFlash 로깅
일부 보드에는 로깅을 위한 SD 카드 인터페이스가 없지만 일반적으로 16MB의 제한된 양의 데이터 플래시가 있습니다. 이는 순환 버퍼와 같은 방식으로 로그 파일을 저장합니다. 플래시가 채워지면 가장 오래된 로그 파일을 현재 로깅 데이터로 덮어씁니다. 공간이 부족할 때 플래시에 파일이 하나만 있는 경우 대신 로깅이 중지됩니다.
새 로그 파일은 부팅 후, 무장 시 또는 LOG_DIISARMED 가 1 인 경우 즉시 시작됩니다 .
LOG_FILE_DSRMROT가 활성화된 경우 모든 해제는 로깅을 중지하고 새 파일은 다음 실행 시 또는 LOG_DIISARMED 가 1인 경우 즉시 시작됩니다. 그렇지 않으면 현재 파일에 대한 로깅이 다시 실행될 때 재개됩니다. 재부팅하면 현재 파일에 대한 로깅이 중지됩니다.
제한된 플래시 공간의 유용성을 극대화하기 위해 다음과 같은 몇 가지 작업을 수행할 수 있습니다.
LOG_BITMASK를 사용하여 기록된 항목을 줄입니다 .
일반적으로 EK3_LOG_LEVEL 매개변수 를 사용하여 문제 진단에만 필요한 방대한 EKF3 메시지 로깅을 제거합니다 .
비행 중 필요한 경우에만 기록합니다. 즉, 튜닝, TECS 튜닝을 위한 데이터 수집 등 "164"로 설정된 RC Aux 스위치를 사용하여 로그 쓰기를 시작 및 중지합니다.
기본적으로 제한이 없는 LOG_BLK_RATEMAX를 설정하여 로깅 속도를 더 느린 속도(10Hz 미만)로 줄입니다 .
비행마다 로그를 다운로드하고 지우고 비행에 대해 하나의 파일만 기록합니다.
메모
일부 데이터 플래시 칩은 특히 느려서 로그에 공백이 생깁니다. LOG_BLK_RATEMAX를 더 낮은 값으로 설정하면 이러한 간격을 제거하는 데 도움이 될 수 있습니다.
MAVLink를 통해 로그 다운로드
USB 케이블을 사용하여 차량을 지상국에 연결하십시오.
미션 플래너의 비행 데이터 화면 열기
왼쪽 하단에서 "DataFlash Logs" 탭을 선택하고 "Download DataFlash Log Via Mavlink" 버튼을 누릅니다.

그런 다음 다운로드할 로그를 선택합니다. 이렇게 하면 해당 로그가 MissionPlanner/logs 디렉터리의 차량 유형 이름을 딴 폴더(예: QUADCOPTER)에 저장됩니다.
로그 자동 분석
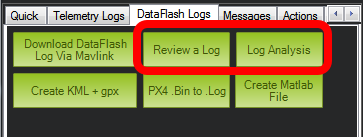
가장 간단한 분석은 일반적인 문제 영역을 강조 표시하는 기본 자동 보고서를 생성하는 것입니다. 이를 위해 "로그 분석"을 클릭하고 이미 MissionPlanner/logs 디렉터리에 저장한 로그를 선택합니다. QUADCOPTER 또는 ROVER와 같이 차량 유형에 따라 이름이 지정된 폴더에 있습니다. 원하는 로그를 선택하면 다음과 같은 보고서가 생성됩니다.

수동으로 로그 검토
더 자세한 분석을 위해 "Review a Log"를 클릭하고 MissionPlanner/logs 디렉터리에 이미 저장한 로그를 선택합니다. 다시 한 번, 그들은 QUADCOPTER 또는 ROVER와 같은 차량 유형에 따라 이름이 지정된 폴더에 있습니다.
인터넷 또는 차량에서 다운로드한 로그를 검토하는 단계
확장자가 .bin 또는 .log인 DataFlash 로그의 경우:
로그 파일을 다운로드합니다. 컴퓨터에서 다운로드되는 위치를 기록해 둡니다. (예: C:\Downloads 일 수 있음)
오픈 미션 플래너
"Flight Data" 페이지로 이동합니다(왼쪽 상단).
"Dataflash Logs" 탭(중간 화면, 왼쪽)을 선택합니다.
"Review a Log" 버튼을 선택합니다.
표준 Windows "select a file" 상자를 사용하면 다운로드한 위치에서 다운로드한 .bin 파일을 찾을 수 있습니다. (위의 예에 따라 C:\Downloads에 있음) 해당 파일을 선택합니다.
로그를 읽은 후 검사를 위해 로그에서 데이터를 구성할 수 있는 수동 로그 검토 창이 열립니다. (아래 참조)
로그 데이터 검토
원하는 로그를 선택하면 아래와 같은 차트가 나타납니다. 데이터 플래시의 기본 형식은 다음과 같습니다.
뷰어의 가장 왼쪽에 줄 번호가 나타납니다.
소프트웨어 버전 및 보드 유형이 상단에 표시됨
FMT 메시지는 각 메시지 유형에 대한 열 헤더를 알려주는 항목입니다.
비행 시작 시 값과 함께 각 매개변수(eeprom에 나타나는 순서대로)를 표시하는 PARM 행
GPS, IMU 등을 포함한 비행 데이터 메시지

적절한 행을 먼저 클릭하여 항공편 데이터를 그래프로 표시하면 열 헤더가 적절하게 업데이트되는 것을 볼 수 있습니다. 그런 다음 그래프로 표시할 열을 찾아 클릭한 다음 "이 데이터 그래프 작성" 버튼을 누릅니다. 위의 예에서 ATT의 Roll-In 및 Roll 데이터가 그래프로 표시되었습니다. 마우스의 스크롤 휠을 사용하여 확대하거나 축소할 수 있습니다. 그래프 영역을 선택하여 확대할 수도 있습니다. 마우스 오른쪽 버튼을 클릭하고 "축척을 기본값으로 설정"을 선택하여 축소합니다. 여기 이 기능 사용에 대한 미니 튜토리얼. 첫 번째 열을 클릭하고 드롭다운에서 메시지 유형을 선택하여 첫 번째 열(항공편 데이터 메시지 유형)만 필터링할 수도 있습니다. 이는 특히 미션 중에 사용되는 다양한 비행 모드("MODE" 메시지라고 함)를 보는 데 매우 유용합니다. 첫 번째 열을 다시 클릭하되 "취소"를 눌러 필터를 지웁니다.

기록할 데이터 설정
LOG_BITMASK 매개변수는 로그에 기록되는 메시지를 제어합니다. 비트는 차량마다 다릅니다.

비트마스크 테이블(콥터)
Bit
BitMask 이름
비트가 설정된 경우 기록되는 내용
1
중간 태도
태도 @ 10Hz
2
GPS
GPS
3
시스템 성능
CPU 등 성능 모니터링
4
컨트롤 튜닝
제어 데이터
5
내비게이션 튜닝
내비게이션 데이터
6
RC 입력
RC 입력 데이터
7
IMU
IMU(ACC/자이로) 데이터
8
임무 명령
임무/GCS 명령어
9
배터리 모니터
배터리 모니터 데이터
10
RC 출력
서보 출력
11
옵티컬 플로우
옵티컬 플로우 데이터
12
PID
PID 컨트롤러 데이터
13
나침반
나침반 데이터
15
카메라
카메라 데이터
17
모터
모터 데이터
19
원시 IMU
처리되지 않은 원시 IMU 데이터
21
빠른 하모닉 노치
빠른 하모닉 노치
ATTITUDE 로깅은 선택 항목의 최고 속도로 발생합니다.
메모
EKF3 데이터의 로깅은 EK3_LOG_LEVEL 파라미터에 의해 제어됩니다.
메시지 세부 정보(콥터)
메모
많은 메시지는 각 차량의 위키 섹션에 있는 온보드 메시지 로그 메시지 페이지에 자세히 설명되어 있습니다.
ATT(자세 정보):
DesRoll
파일럿이 원하는 롤 각도(도)(롤 왼쪽은 음수, 오른쪽은 양수)
Roll
비히클의 실제 롤 각도(왼쪽 롤은 음수, 오른쪽 롤은 양수)
DesPitch
파일럿이 원하는 피치 각도(도)(피치 포워드는 음수, 피치 백은 양수)
Pitch
비히클의 실제 피치 각도(도)(앞 피치는 음수, 뒤로 피치는 양수)
DesYaw
0 = 북쪽으로 조종사가 원하는 방향(도)
Yaw
차량의 실제 방향(도 단위, 0 = 북쪽)
ErrRP
롤/피치 오류 추정치의 평균 크기(0과 1 사이의 값)
ErrYaw
요 오류 추정치의 평균 크기(0과 1 사이의 값)
ATUN(자동 조정 개요):
축: 0 = 롤, 1 = 피치
TuneStep
0 = 레벨로 돌아가기(테스트 전 또는 후), 1 = 테스트(예: 응답을 테스트하기 위해 트위치 수행), 2 = 게인 업데이트(트위치 완료 및 게인 조정)
RateMin
이 테스트 중 최소 기록 속도
RateMax
이 테스트 동안 최대 기록 속도
RPGain
테스트 중인 비율 P 게인 값
RDGain
테스트 중인 속도 D 게인 값
SPGain
테스트 중인 P 게인 안정화
ATDE(자동 조정 단계 세부 정보):
Angle
테스트 중인 축에 대한 콥터 각도(centi-degree)x
Rate
테스트 중인 축에 대한 콥터의 회전 속도
CAM(카메라 셔터가 활성화된 시간 및 위치):
GPSTime
밀리초 단위의 에포크 이후 GPS 보고 시간
Lat
가속도계 + GPS 위도 추정치
LNG
가속도계 + GPS 경도 추정치
Alt
가속도계 + 기압계 예상 고도(지상 cm)
Roll
차량 롤 각도(centi-degree)
Pitch
차량 피치 각도(centi-degree)
Yaw
차량의 방향(센티도)
CMD(지상국에서 수신하거나 임무의 일부로 실행되는 명령):
CTot
임무의 총 명령 수
CNum
임무에서 이 사령부의 번호(0은 항상 집, 1은 첫 번째 사령부 등)
CId
MAVLink 메시지 ID
Copt
옵션 매개변수(다양한 용도로 사용됨)
Prm1
명령의 매개변수(다양한 용도로 사용됨)
Alt
명령의 고도(미터)
Lat
명령의 위도 위치
LNG
명령의 경도 위치
COMPASS(원시 나침반, 오프셋 및 나침반 보정 값):
필드
설명
MagX, MagY. MagZ
x, y 및 z 축에 대한 원시 자기장 값
OfsX, OfsY, OfsZ
원시 자기 오프셋(COMPASS_LEARN 매개변수가 1인 경우에만 변경됨)
MOfsX, MOfsY, MOfsZ
스로틀 또는 전류에 대한 Compassmot 보상
CURRENT(배터리 전압, 전류 및 보드 전압 정보):
필드
설명
Thr
0 ~ 1000의 파일럿 입력 스로틀
ThrInt
통합 스로틀(즉, 이 비행에 대한 총 스로틀 출력의 합)
Volt
볼트 단위의 배터리 전압 * 100
Curr
배터리에서 끌어온 전류(amps * 100)
VCC
보드 전압
CurrTot
배터리에서 끌어온 총 전류
CTUN(제어, 스로틀 및 고도 정보):
필드
설명
TimeUS
마이크로초 단위의 메시지 타임스탬프(무시할 수 있음)
ThI
조종사의 스로틀은 0에서 1000 사이의 숫자로 표시됩니다.
ABst
앵글 부스트: 콥터가 기울어짐에 따라 스로틀 증가(0 ~ 1000)(기울어지는 동안 고도 손실을 줄이기 위해 모든 조종사 및 자동 조종 장치 스로틀에 자동으로 추가됨)
ThO
모터로 전송되는 최종 스로틀 출력(0 ~ 1000). 일반적으로 안정화 모드에서는 ThrI+ABst와 동일합니다.
ThH
0 ~ 1 범위의 스로틀 호버링에 필요한 예상 스로틀
DAlt
AltHold, Loiter, RTL 또는 자동 비행 모드에서 원하는 고도. EKF 원점의 영향을 받으며 3.5.X에서는 GPS 고도로 수정됩니다. 이 동작은 3.6.X에서 꺼져 있으며 EKF_OGN_HGT_MASK로 켤 수 있습니다.
Alt
현재 EKF 고도
BAlt
기압계 고도: 기압계에 따른 지상 고도
DSAlt
지면 또는 천장에서 원하는 cm 단위 거리(소나를 사용할 수 있는 경우에만 표시됨)
SAlt
Sonar Altitude: 소나에 따른 지상고도 (Sonar의 가시성만 가능)
TAlt
지형 고도(기본적으로 사용되지 않음)
DCRt
원하는 상승률(cm/s)
CRt
상승률(cm/s)
N
자이로에 대한 고조파 노치 전류 중심 주파수(Hz)
D32, DU32(부호 있는 32비트 정수 또는 부호 없는 32비트 정수인 단일 데이터 값):
필드
설명
ID
변수의 식별 번호입니다. 가능한 값은 두 가지뿐입니다.
7 = 내부 상태의 비트 마스크(개별 비트의 의미는 ap 구조 의 def'n에서 찾을 수 있습니다.
9 = 단순 모드의 초기 방향(단위: centi-degree)
EKF(확장 칼만 필터 ):
여기에 (Dev Wiki). 개요는 여기 참고 하세요.
ERR(오류 메시지):
아래 나열된 하위 시스템 및 오류 코드
서브시스
ECode 및 설명
2 = 라디오
0 = 해결된 오류
2 = 늦은 프레임: 2초 동안 수신자로부터 수신된 업데이트 없음
3 = 나침반
0 = 해결된 오류
1 = 초기화 실패(아마도 하드웨어 문제)
4 = 비정상: 센서에서 읽지 못했습니다.
5 = 라디오 페일세이프
0 = 안전 장치 해결됨
1 = 페일세이프 트리거됨
6 = 배터리 안전 장치
0 = 안전 장치 해결됨
1 = 페일세이프 트리거됨
8 = GCS 안전 장치
0 = 안전 장치 해결됨
1 = 페일세이프 트리거됨
9 = 울타리 안전 장치
0 = 안전 장치 해결됨
1 = 고도 펜스 위반, 페일세이프 트리거됨
2 = 원형 펜스 위반, 페일세이프 트리거됨
3 = Alt 및 원형 펜스 모두 위반됨, 안전 장치 트리거됨
4 = 폴리곤 펜스 위반, 페일세이프 트리거됨
10 = 비행 모드 변경 실패
잘못된 위치 추정으로 인해 차량이 원하는 비행 모드로 정상적으로 진입할 수 없었습니다.
여기에서 비행 모드 번호를 확인하세요.
11 = GPS
0 = 글리치 제거됨
2 = GPS 결함 발생
12 = 충돌 확인
1 = 지면 충돌이 감지되었습니다. 일반적으로 차량은 곧 해제됩니다.
2 = 통제력 상실이 감지되었습니다. 일반적으로 낙하산은 곧 해제됩니다.
13 = 뒤집기 모드
2 = 뒤집기 포기(무장, 파일럿 입력 또는 시간 초과)
15 = 낙하산
2 = 배치되지 않음, 차량이 너무 낮음
3 = 배치되지 않음, 차량이 착륙함
16 = EKF 확인
0 = 분산이 지워짐(위치 추정 OK)
2 = 불량 분산(위치 추정 불량)
17 = EKF 페일세이프
0 = 안전 장치 해결됨
1 = 페일세이프 트리거됨
18 = 기압계
0 = 해결된 오류
4 = 비정상: 센서에서 읽지 못했습니다.
19 = CPU 로드 워치독
0 = 안전 장치 해결됨
1 = 페일세이프 트리거됨(일반적으로 차량 해제)
20 = ADSB 페일세이프
0 = 안전 장치 해결됨
1 = 파일럿에게 보고하기만 하는 조치 없음
2 = 오르거나 내리면서 차량이 회피함
3 = 차량이 수평으로 이동하여 회피
4 = 차량이 다른 차량과 수직으로 이동하여 회피
5 = RTL 호출됨
21 = 지형 데이터
2 = 누락된 지형 데이터
22 = 내비게이션
2 = 목적지 설정 실패
3 = RTL 재시작됨
4 = 서클 초기화 실패
5 = 펜스 외부의 목적지
23 = 지형 안전 장치
0 = 안전 장치 해결됨
1 = 페일세이프 트리거됨(일반적으로 차량 RTL)
24 = EKF 기본이 변경됨
0 = 첫 번째 EKF가 기본이 됨
1 = 두 번째 EKF가 기본이 됨
25 = 추력 손실 확인
0 = 복원된 추력
1 = 추력 손실 감지됨(요 제어보다 고도가 우선 순위가 될 수 있음)
26 = 센서 페일세이프(하위)
0 = 센서 페일세이프 해제됨
1 = 센서 페일세이프 트리거됨
27 = 누출 안전 장치(하위)
0 = 누출 안전 장치 해제됨
1 = 누출 감지기 페일세이프 트리거됨
28 = 파일럿 입력 타임아웃 페일세이프(Sub 전용)
0 = 파일럿 입력 페일세이프 해제됨
1 = 파일럿 입력 페일세이프 트리거됨
29 = 진동 페일세이프
0 = 과도한 진동 보상 비활성화
1 = 과도한 진동 보정 활성화됨
EV: (이벤트 번호) . 가능한 이벤트의 전체 목록은 AP_Logger.h 에서 찾을 수 있지만 가장 일반적인 것은 다음과 같습니다.
이벤트 번호
설명
10
무장
11
무장해제
15
자동 무장(조종사가 스로틀을 0 이상으로 올렸고 자동조종장치가 자유롭게 스로틀을 제어할 수 있음)
18
랜드 컴플리트
25
홈 설정(홈 위치 좌표가 캡처됨)
28
착륙하지 못함(일명 이륙 완료)
GPA: (전체 위치 정확도)
필드
설명
VDop
정밀도의 수직 희석, 정밀도의 단위 없는 척도 https://en.wikipedia.org/wiki/Dilution_of_precision
HAcc
GPS 모듈에서 보고한 수평 정확도(미터)
VACc
GPS 모듈에서 보고한 수직 정확도(미터)
SAcc
GPS에서 보고한 속도 정확도(m/s/s)
VV
GPS가 수직 속도를 보고하는지 여부를 나타내는 플래그
0 수직 속도 데이터 없음 1 GPS에 수직 속도 데이터 있음
SMS
정확도/GPS 위치 데이터와 관련된 자동조종 시간(밀리초)입니다.
델타
이전 GPS 메시지와 현재 GPS 메시지가 자동 조종 장치에 의해 구문 분석된 시간 사이의 시간(밀리초)
GPS:
필드
설명
상태
0 = GPS 없음, 1 = GPS이지만 수정 없음, 2 = 2D 수정이 있는 GPS, 3 = 3D 수정이 있는 GPS
시간
밀리초 단위의 에포크 이후 GPS 보고 시간
NSat
현재 사용 중인 위성 수
HDop
GPS 정밀도 측정(1.5는 양호, >2.0은 그다지 양호하지 않음) https://en.wikipedia.org/wiki/Dilution_of_precision
위도
GPS에 따른 위도
LNG
GPS에 따른 경도
RelAlt
가속도계 + Baro 고도(미터)
대체
GPS 보고 고도(자동 조종 장치에서 사용하지 않음)
SPD
수평 지상 속도(m/s)
GCrs
그라운드 코스(도)(0 = 북쪽)
IMU(가속도계 및 자이로 정보):
필드
설명
GyrX, GyrY, GyrZ
원시 자이로 회전 속도(라디안/초)
AccX, AccY, AccZ
원시 가속도계 값(m/s/s)
모드(비행 모드):
Mode
설명
방법
문자열로 표시되는 비행 모드(예: STABILIZE, LOITER 등)
ThrCrs
안정적인 호버링을 유지하기 위해 어떤 스로틀이 필요한지에 대한 자동 조종 장치의 최선의 추측인 스로틀 크루즈(0 ~ 1000)
Rsn
모드 변경 이유(TX 명령, 안전 장치 등) . 코드 값의 의미는 ModeReason 에서 찾을 수 있습니다.
NTUN(내비게이션 정보):
필드
설명
WPDst
다음 웨이포인트(또는 로이터 타겟)까지의 거리(cm). Loiter, RTL, Auto에서만 업데이트됩니다.
WPBrg
다음 웨이포인트까지의 방위각(도)
PErX
콥터와 위도 방향의 다음 웨이포인트 사이의 중간 목표물까지의 거리
PERY
콥터와 경도 방향의 다음 웨이포인트 사이의 중간 표적까지의 거리
DVelX
위도 방향으로 원하는 속도(cm/s)
DVelY
경도 방향으로 원하는 속도(cm/s)
VelX
위도 방향의 실제 가속도계 + GPS 속도 추정치
VelY
경도 방향의 실제 가속도계 + GPS 속도 추정치
DAcX
위도 방향으로 원하는 가속도(cm/s/s)
DAcY
경도 방향으로 원하는 가속도(cm/s/s)
DRol
원하는 롤 각도(단위: centi-degree)
DPit
원하는 피치 각도(센티도)
PM(성능 모니터링):
필드
설명
NLon
장기 실행 메인 루프 수(예: SCHED_LOOP_RATE 에 따라 필요한 것보다 20% 이상 더 오래 걸리는 루프 - 예: 400Hz 속도의 경우 3ms)
NLoop
마지막 PM 메시지가 표시된 이후의 총 루프 수입니다. 이를 통해 느리게 실행되는 루프의 백분율을 계산할 수 있습니다(15%보다 높지 않아야 함). 값은 자동조종 장치 클럭 속도에 따라 달라집니다.
MaxT
마지막 PM 메시지 이후 루프가 걸린 최대 시간입니다. 이는 스케줄러 루프 기간의 120%를 초과하면 안 되지만 모터가 준비되는 간격 동안에는 훨씬 더 높아집니다.
Mem
사용 가능한 메모리(바이트)
Load
CPU가 사용될 때 스케줄러 루프 기간의 백분율(10배)
RCOUT(개별 RC 출력에 대한 PWM 출력):
RC1, RC2 등: 자동 조종 장치에서 esc/motor/RC 출력으로 pwm 명령 전송
KMZ 파일 보기
autopilot에서 dataflash 로그 파일을 다운로드하면 자동으로 KMZ 파일(확장자가 .kmz인 파일)이 생성됩니다. 이 파일은 Google 어스에서 열 수 있으며(파일을 두 번 클릭하기만 하면 됨) Google 어스에서 항공편을 볼 수 있습니다. 자세한 내용은 Telemetry Logs 페이지 의 지침을 참조하십시오 .
Last updated