ESC와 모터 연결
각 ESC의 전원(+), 접지(-) 및 신호(s) 선을 모터 번호로 자동 조종 장치의 주 출력 핀에 연결합니다. 모터의 할당된 순서를 결정하려면 아래에서 프레임 유형을 찾으십시오.
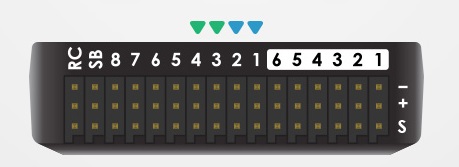
Pixhawk 출력 핀(번호가 매겨짐). 처음 4개의 핀은 쿼드프레임 연결을 위해 색상으로 구분되어 있습니다.¶
모터 번호 다이어그램
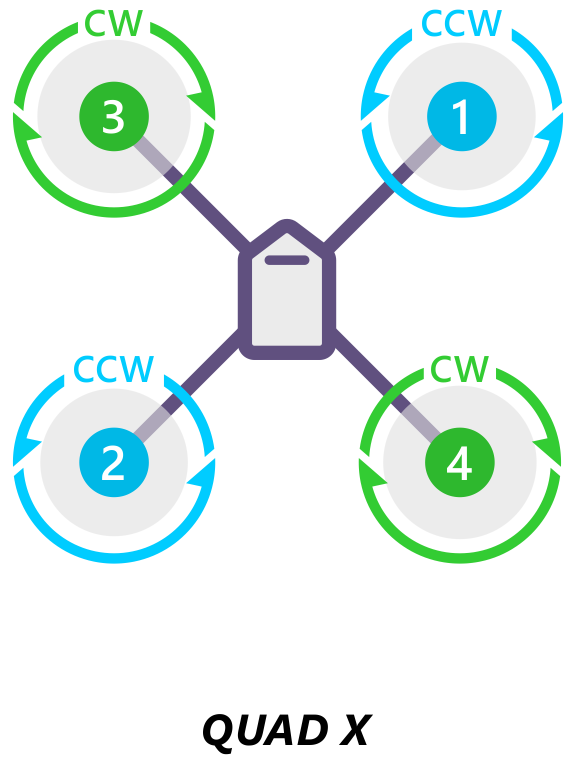
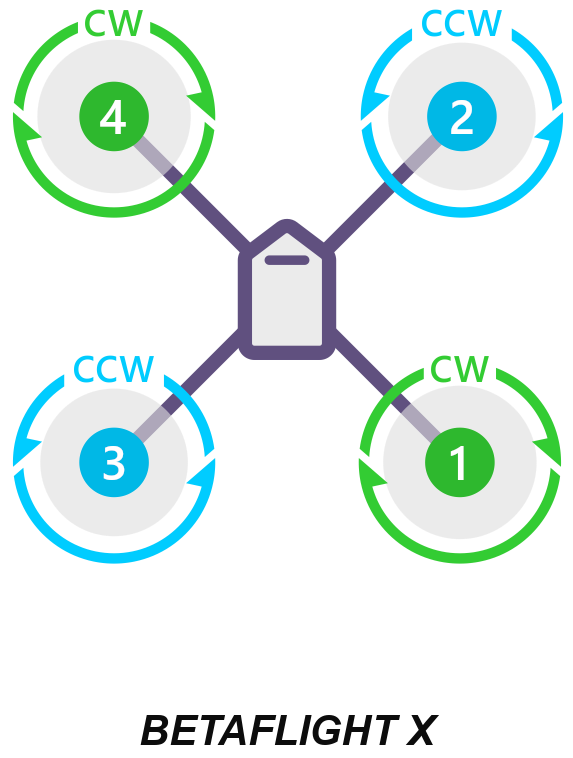
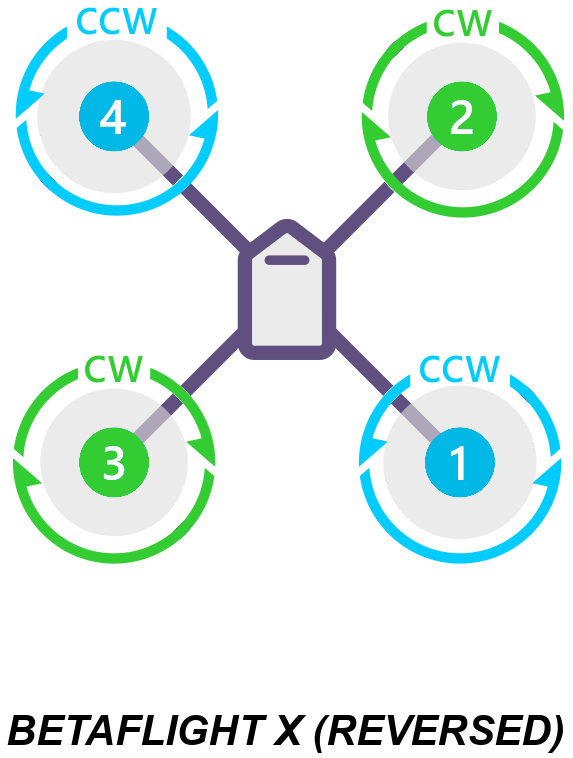
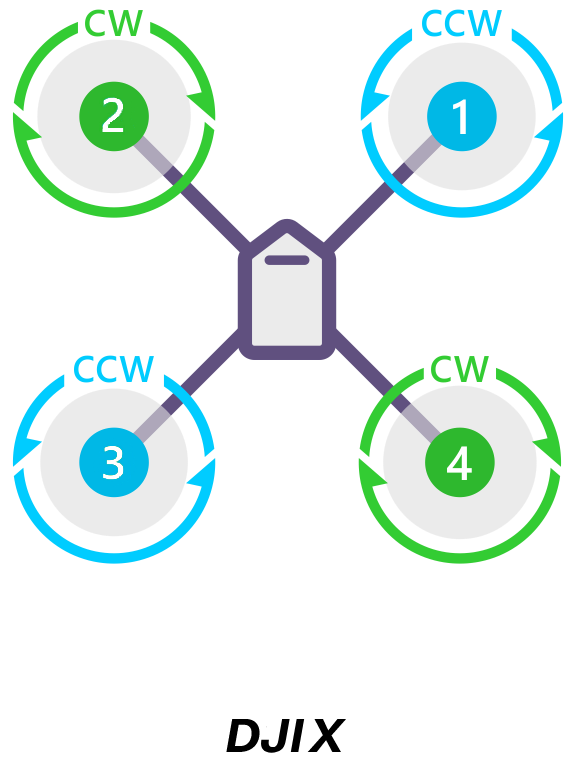
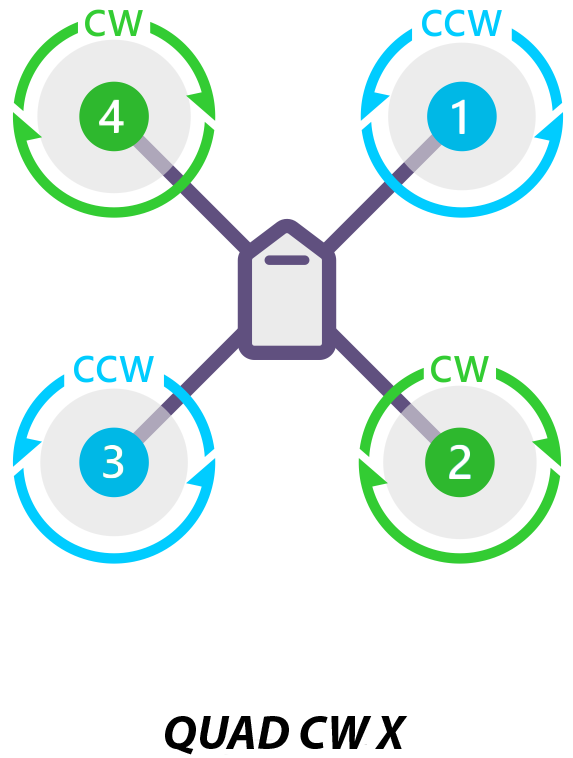
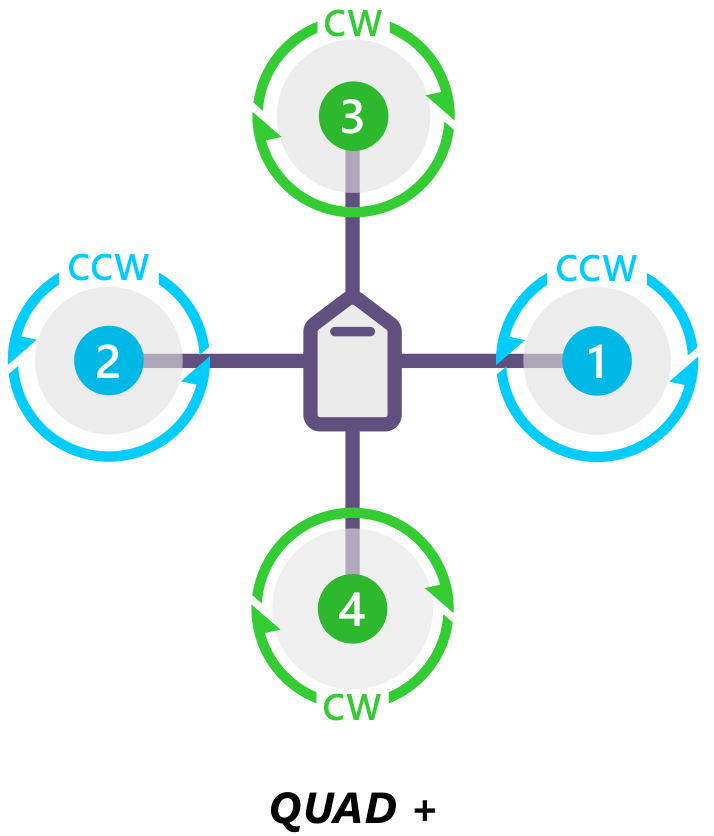
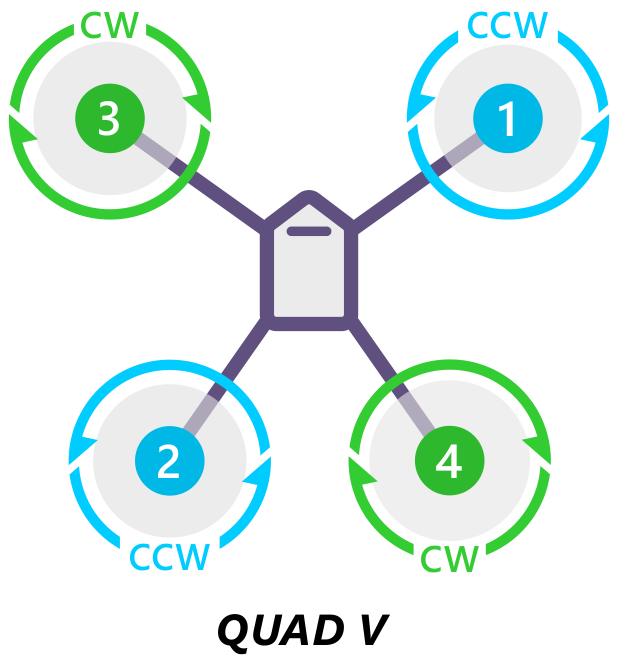
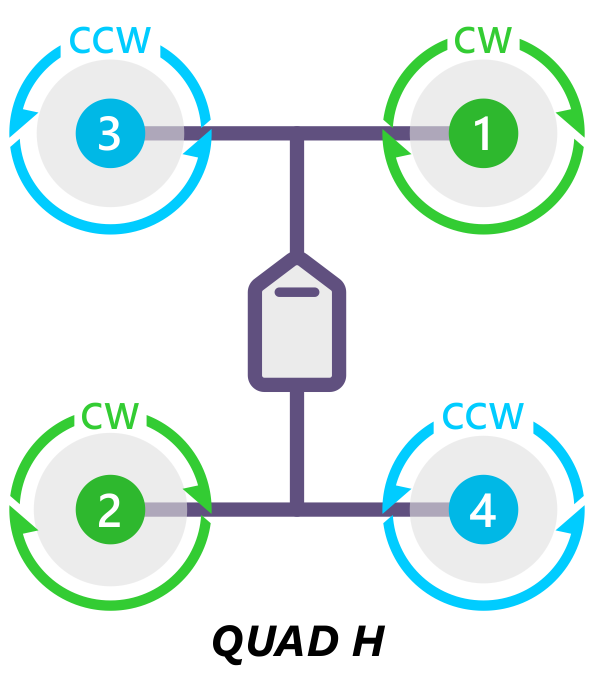
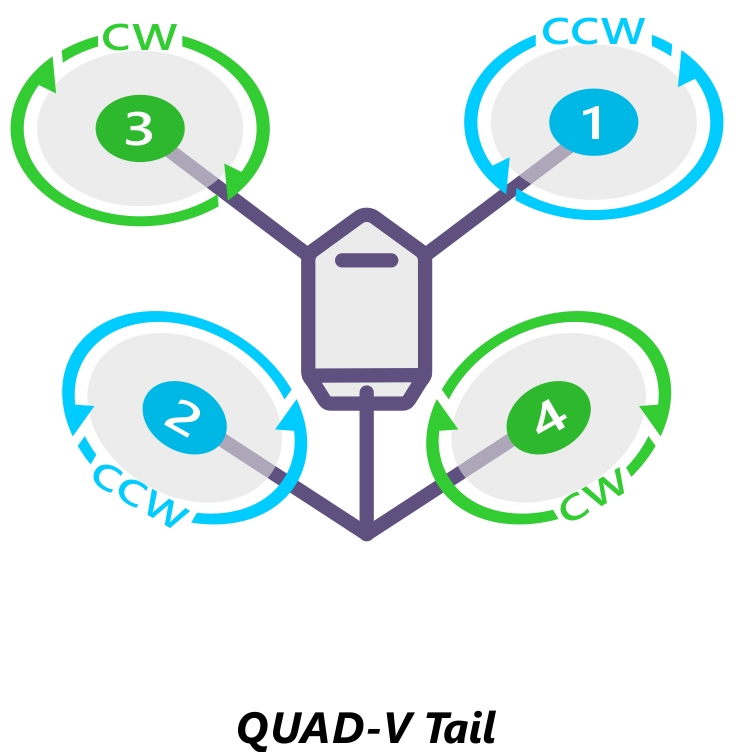
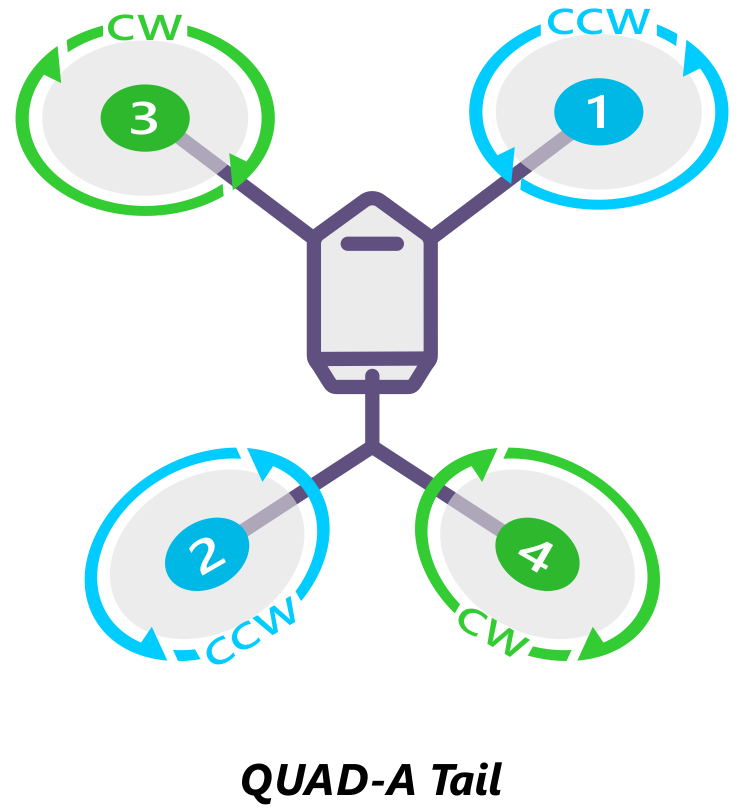
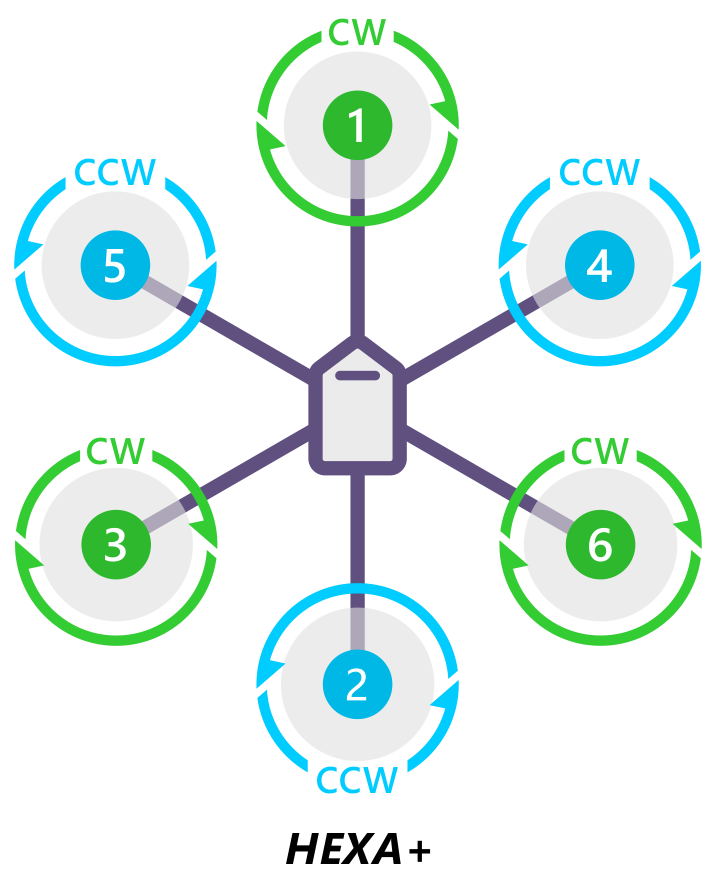
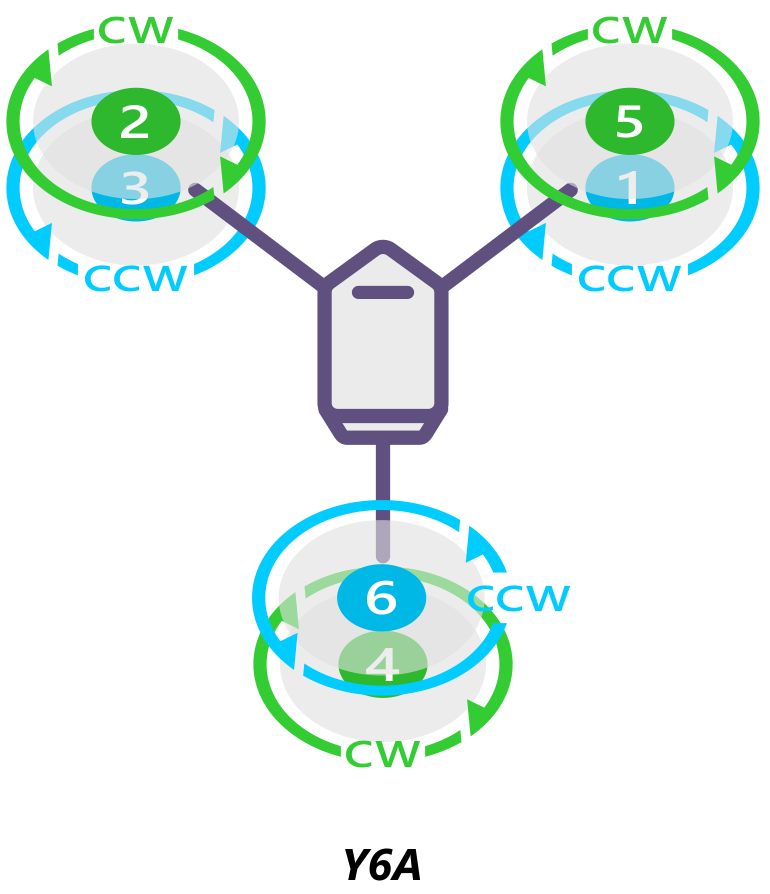
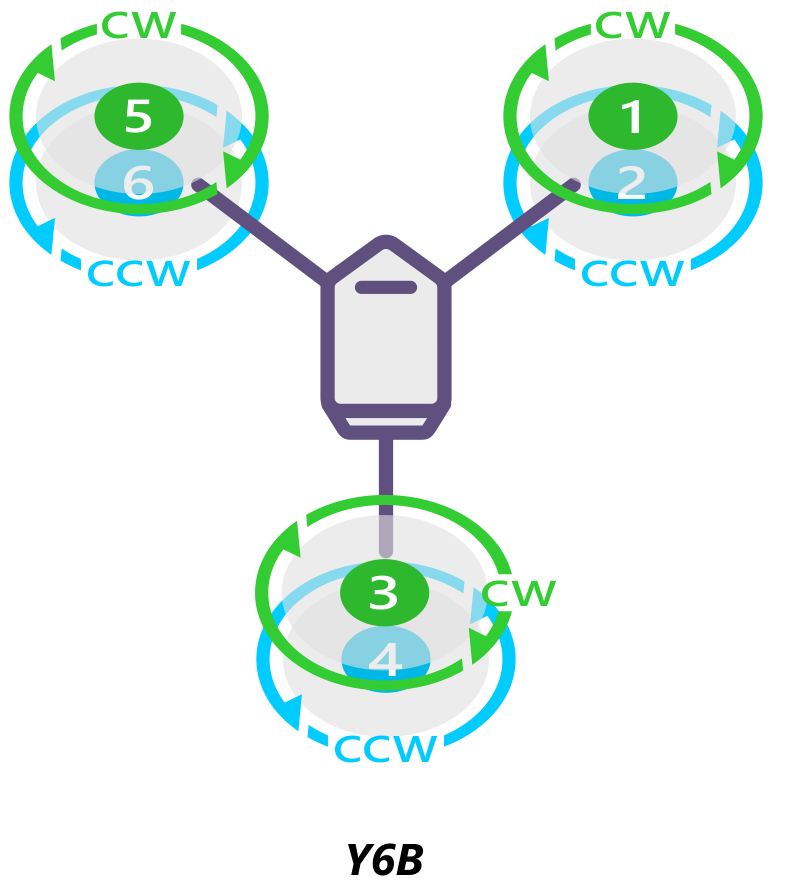
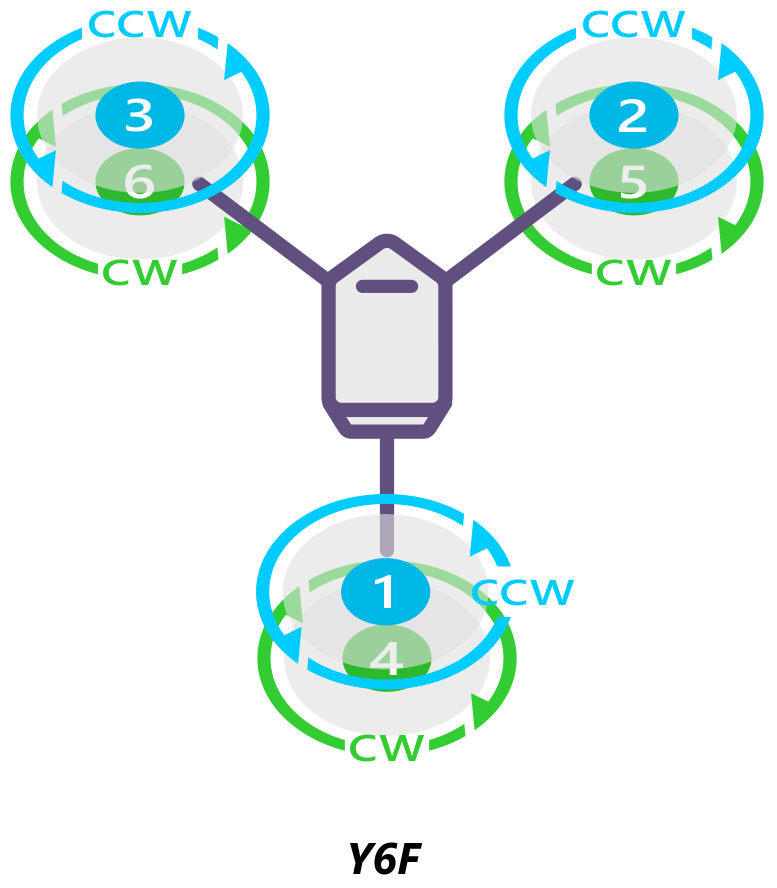
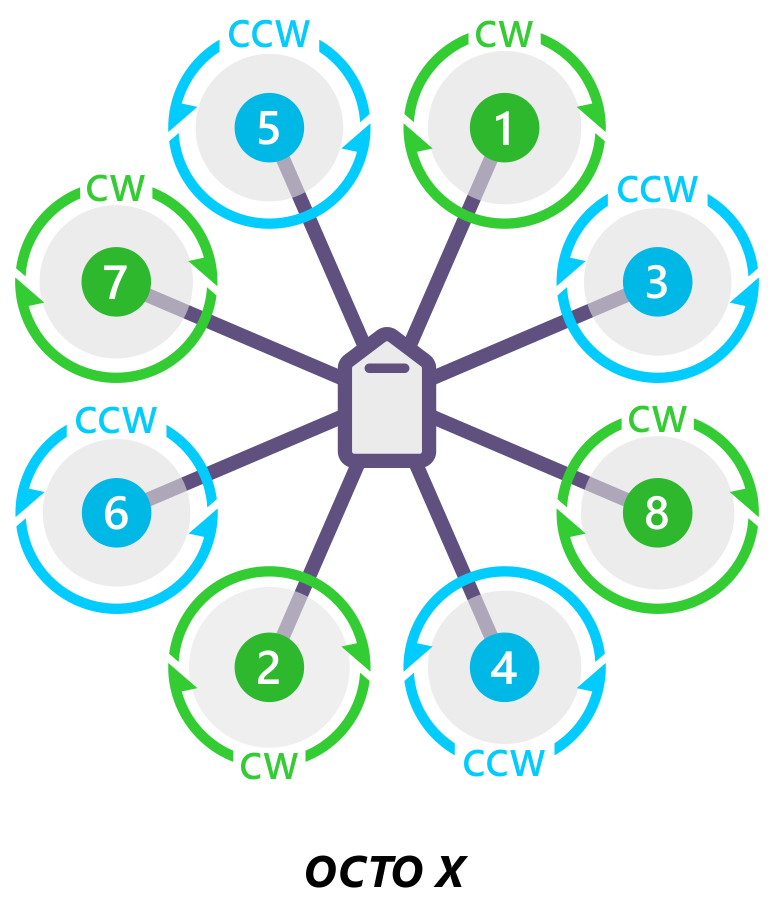
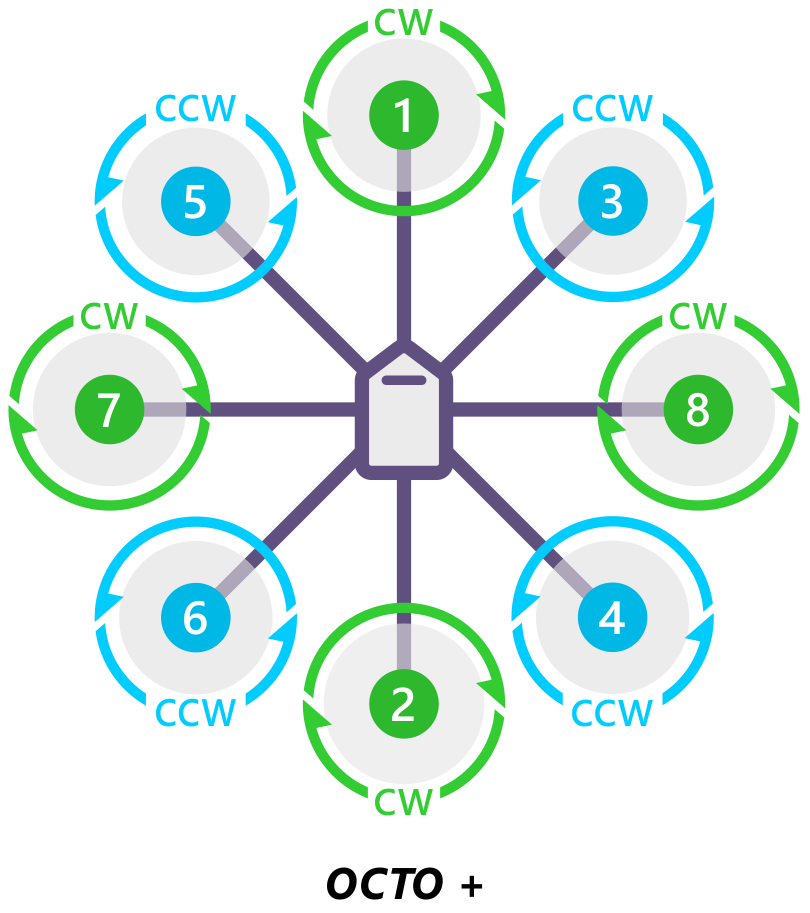
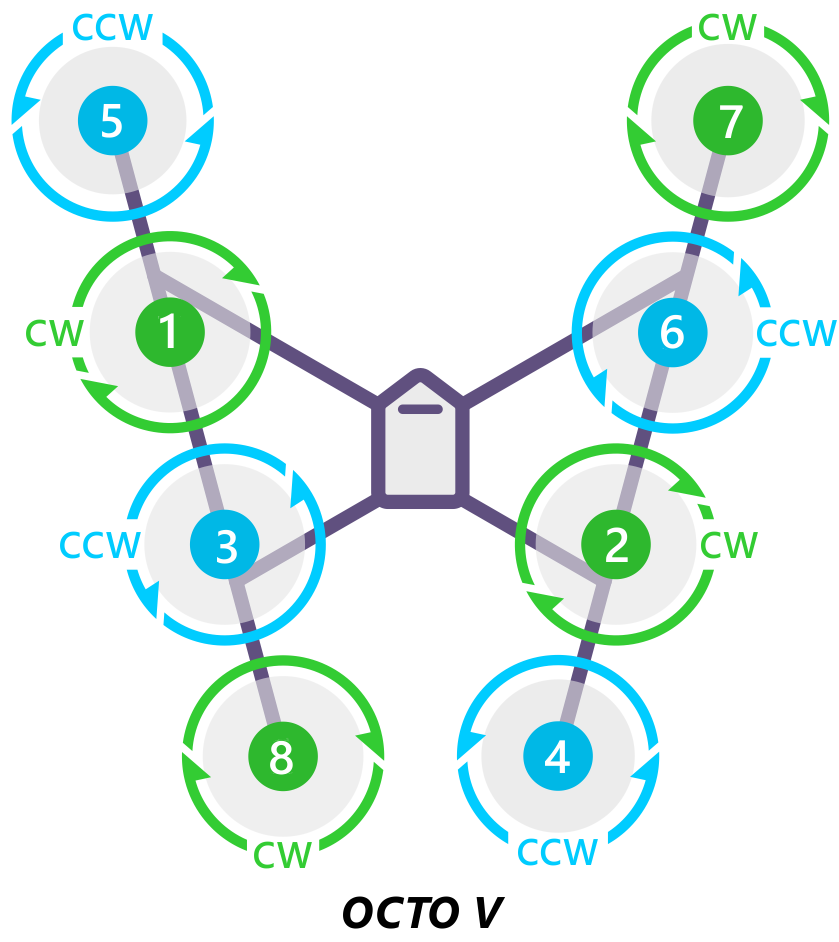
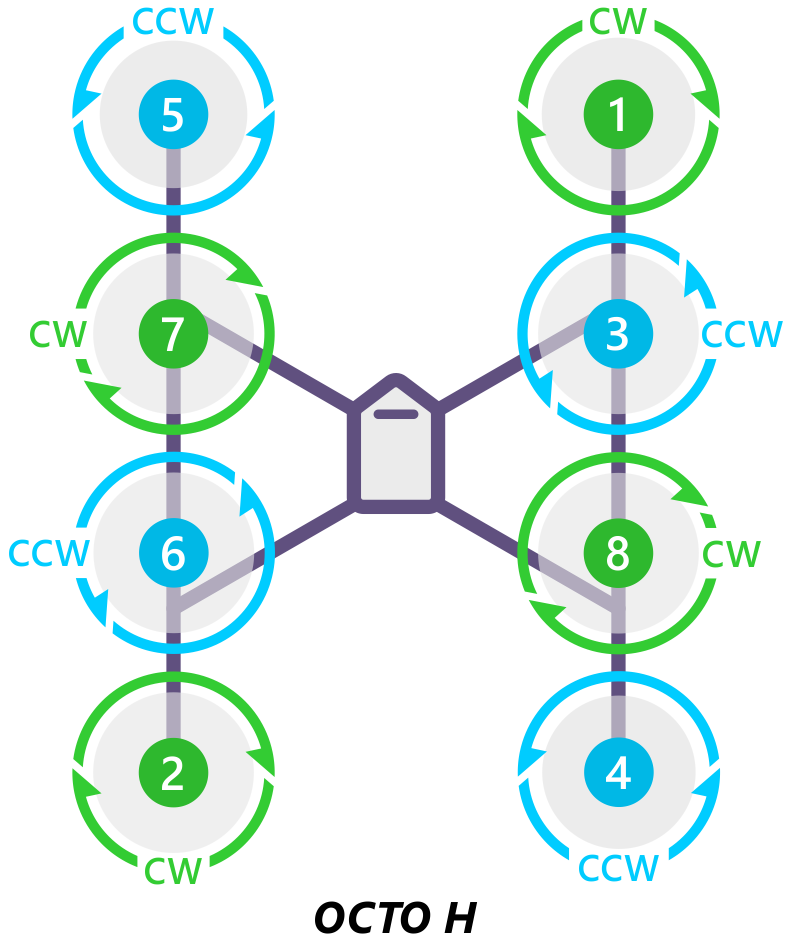
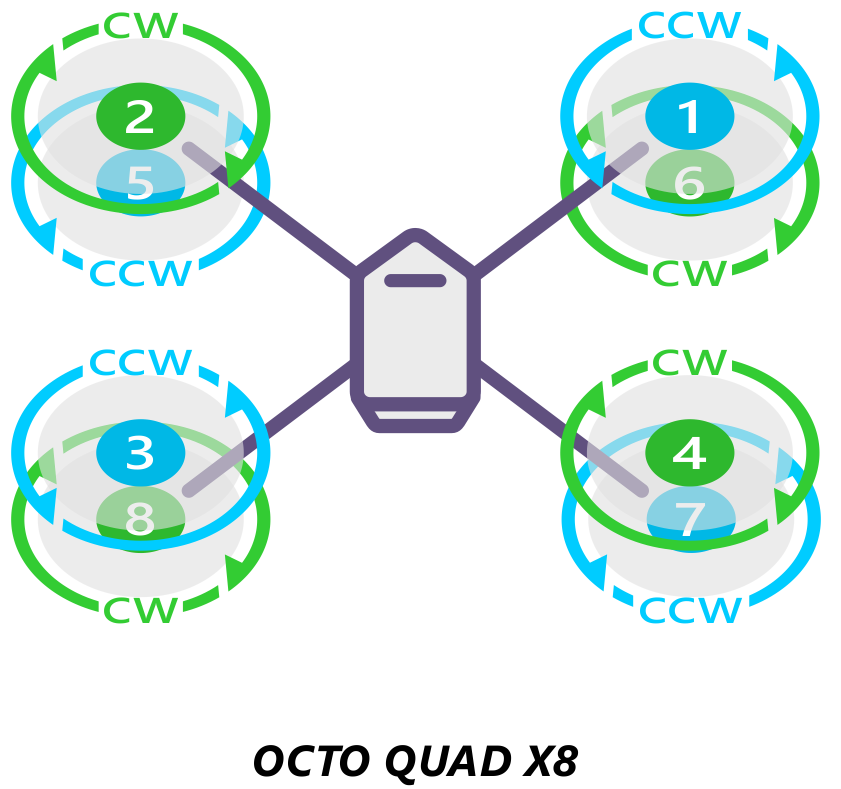
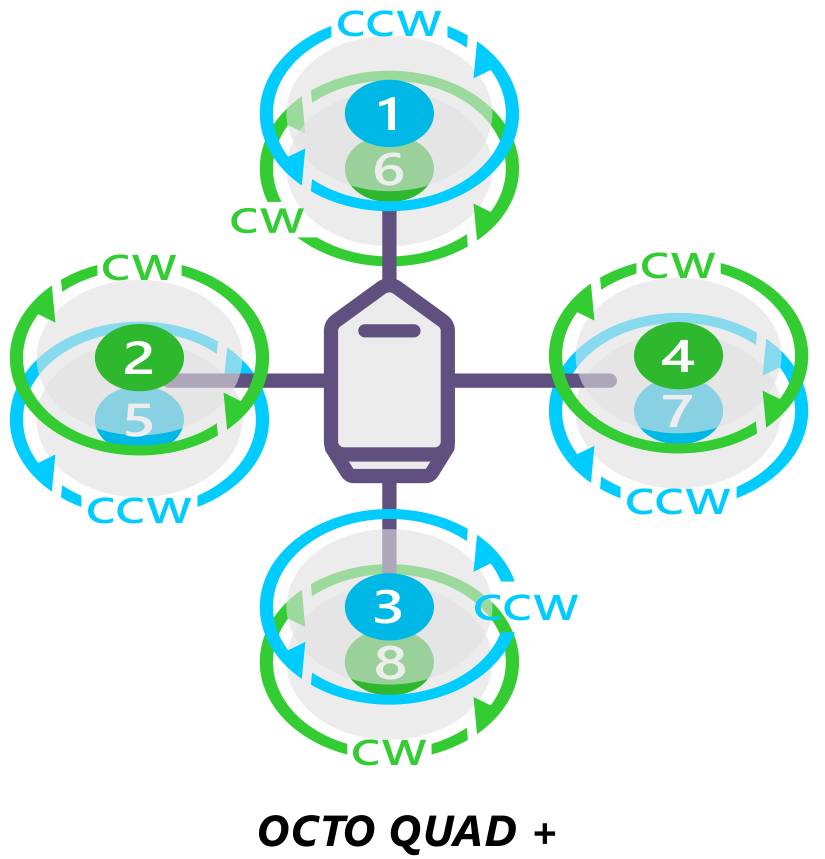
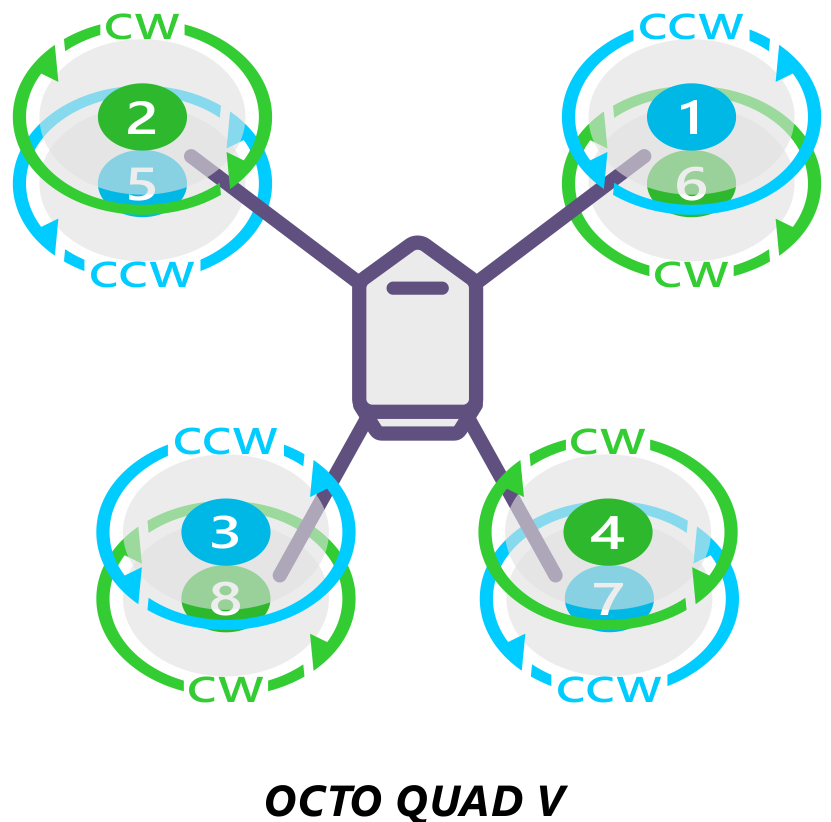
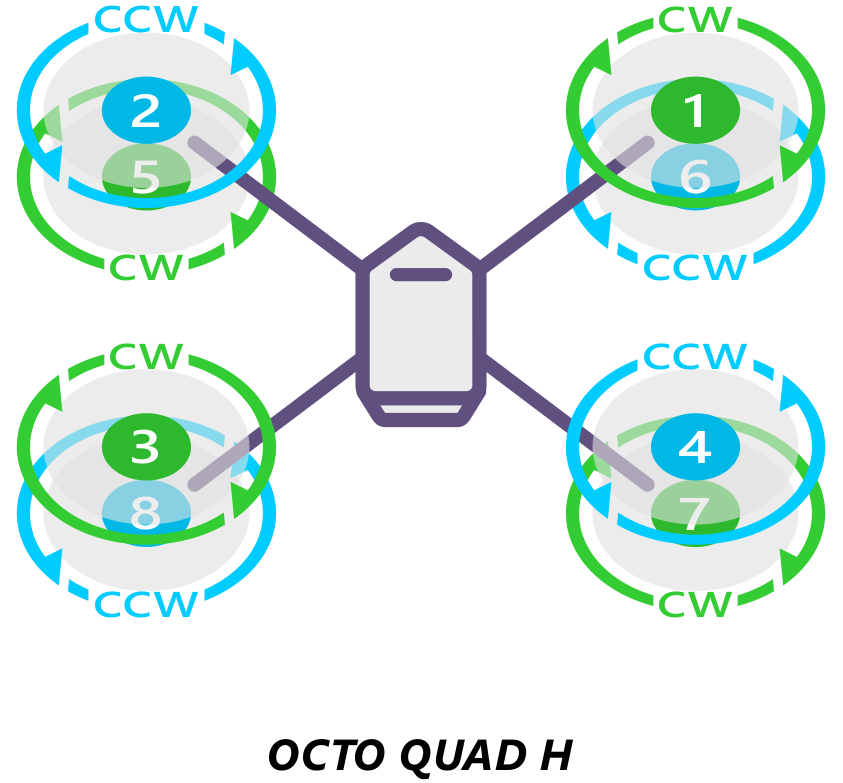
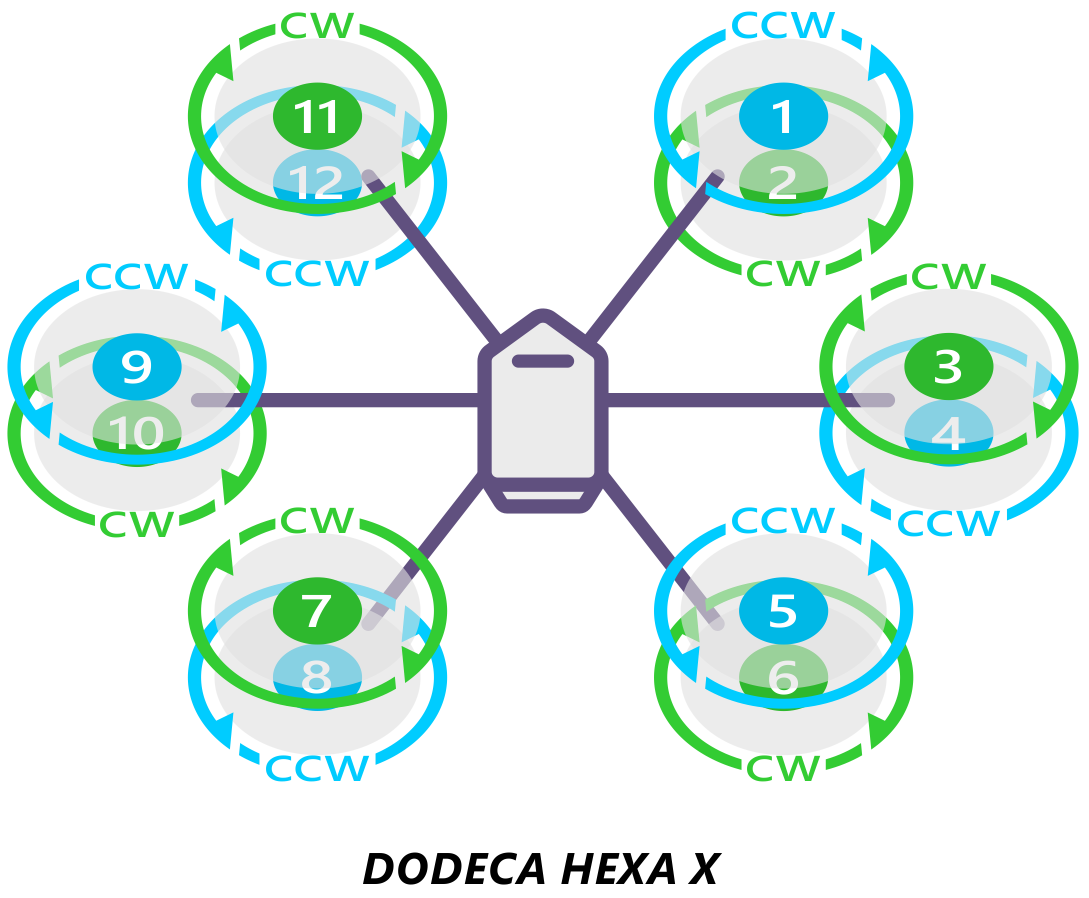
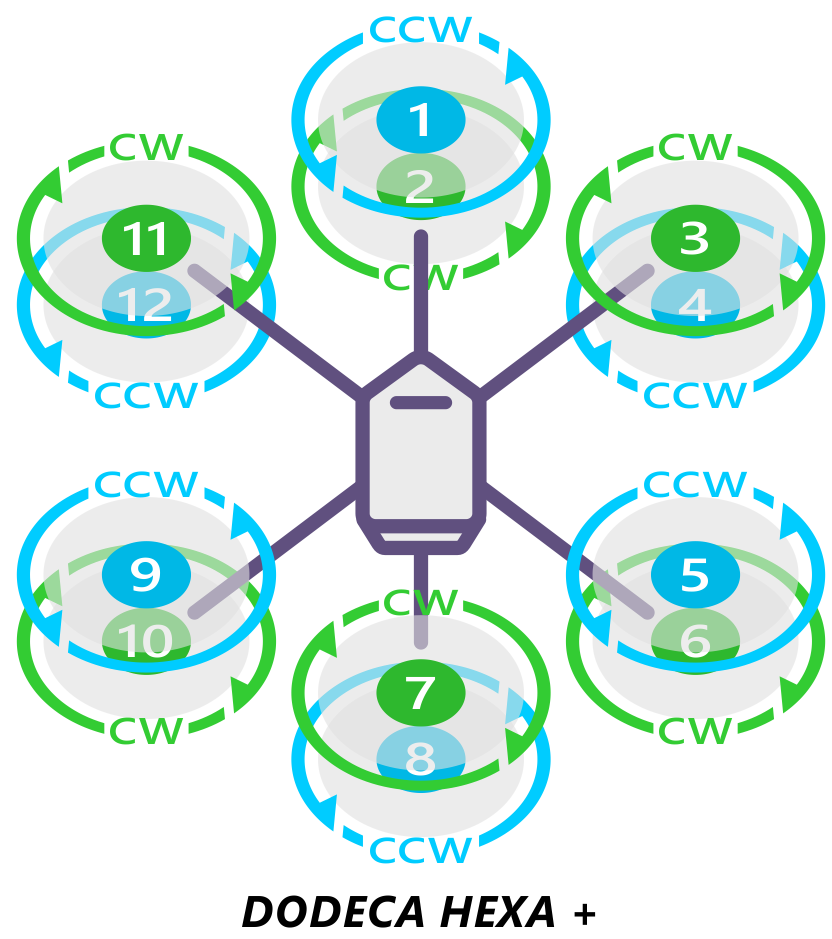
아래 다이어그램은 각 프레임 유형에 대한 모터 순서를 보여줍니다. 숫자는 각 모터/프로펠러에 연결해야 하는 자동 조종 장치의 출력 핀을 나타냅니다. 프로펠러 방향은 녹색(시계 방향, CW) 또는 파란색(시계 반대 방향, CCW)으로 표시됩니다.

쿼드콥터
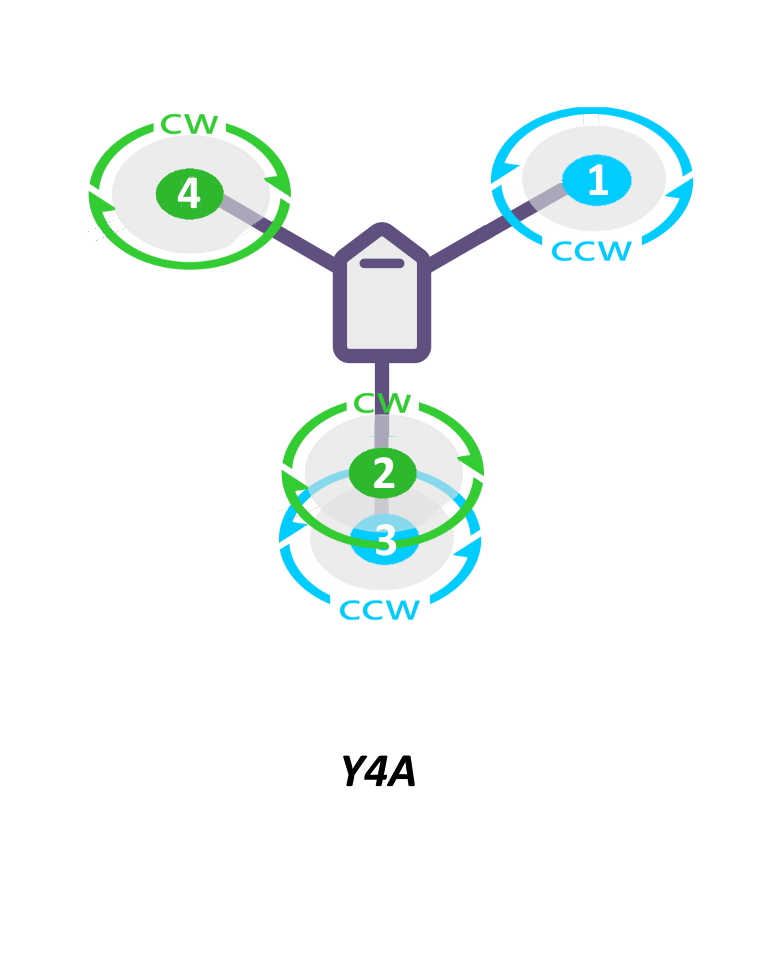
트라이콥터
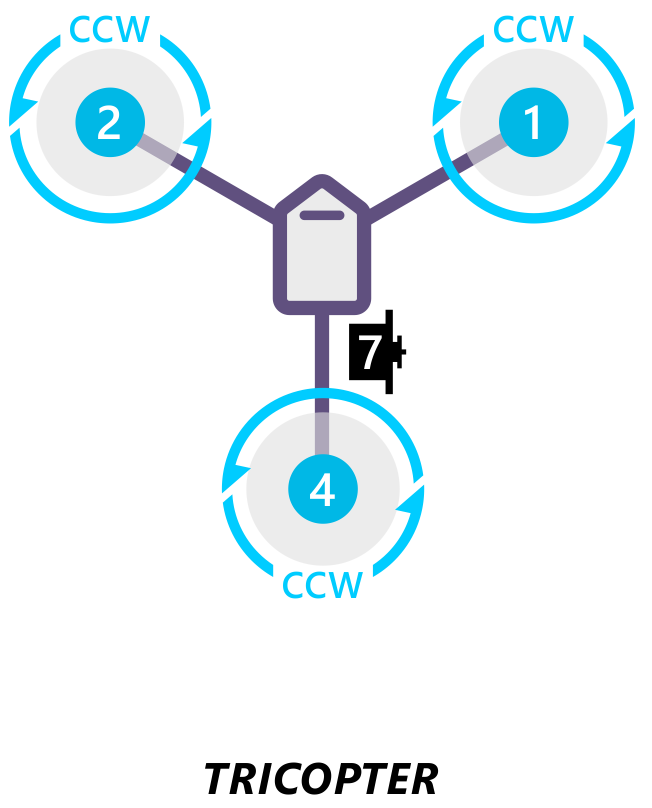
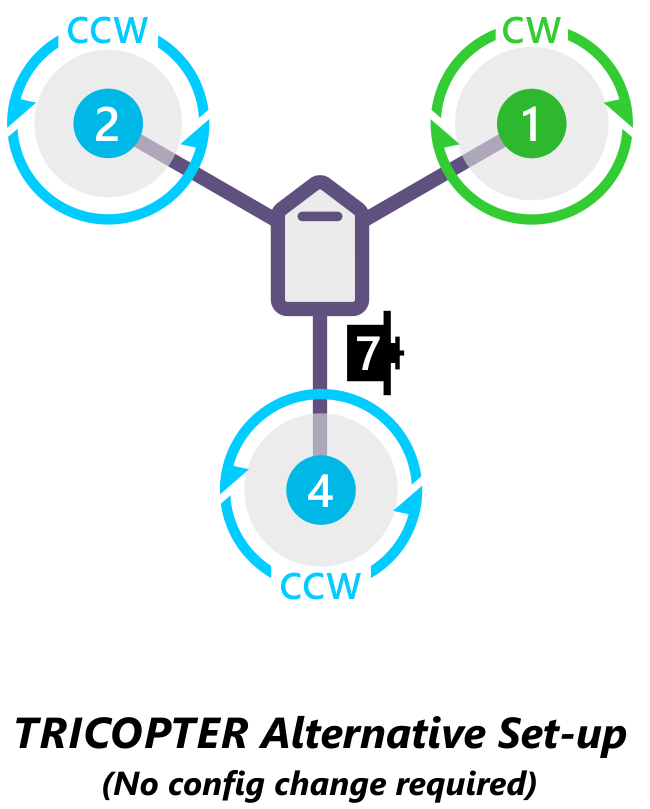
메모
꼬리 서보의 방향이 편요에 반응하여 잘못된 방향으로 가고 있다면 RCn_REVERSERC 입력 방향이나 틸트 서보의 SERVOn_REVERSE매개변수를 1(0에서)로 설정해야 합니다. 자세한 내용은 TriCopter 설정 페이지를 참조하십시오.)
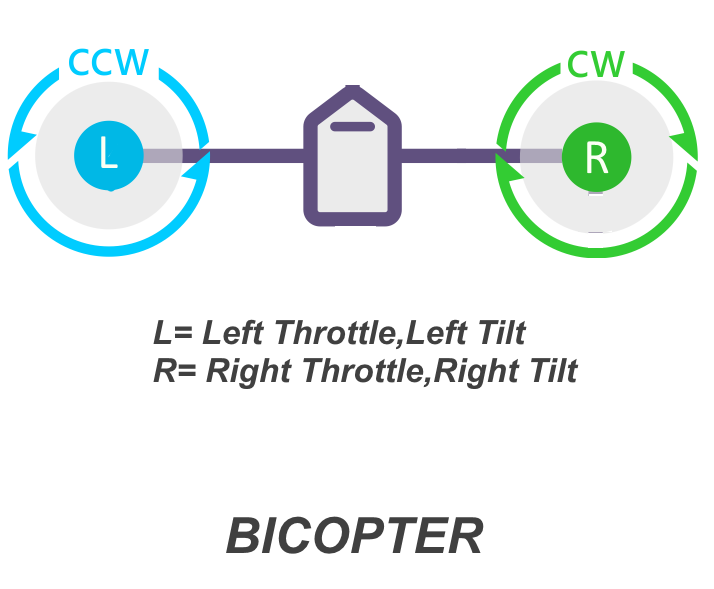
바이콥터
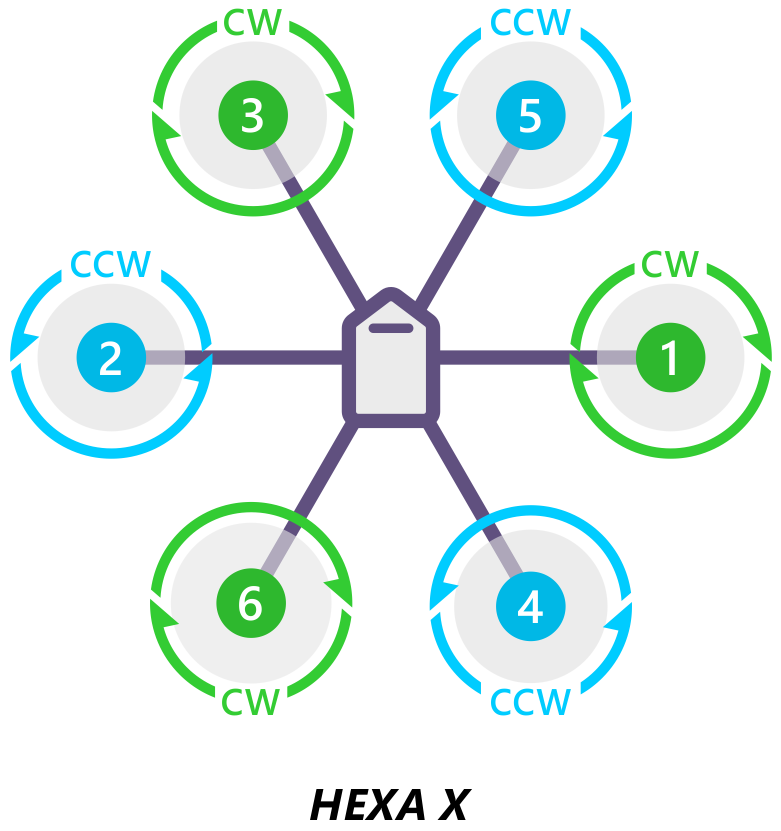
헥사콥터

Y6
옥토콥터
옥토쿼드
도데카헥사콥터
맞춤 프레임
lua 스크립팅을 사용하여 최대 12개의 모터를 사용하여 사용자 정의 프레임 유형을 구성할 수 있습니다 . 각 모터의 롤, 피치 및 요 요인은 스크립트에서 계산하고 로드해야 합니다. 이것은 FRAME_CLASS를 15 - Scripting Matrix로 설정하면 활성화됩니다. 참조: 플러스 쿼드 예제 및 내결함성 16진수 예제 .
메모
모든 자동 조종 장치가 스크립팅을 지원하는 것은 아닙니다. 펌웨어 제한 사항을 참조하십시오 .
시계 방향 및 시계 반대 방향 프로펠러 인식
위의 다이어그램은 시계 방향(푸셔라고 함)과 시계 반대 방향(풀러라고 함)의 두 가지 유형의 프로펠러를 보여줍니다. 아래 그림과 같이 프로펠러의 모양으로 올바른 프로펠러 유형을 가장 확실하게 인식합니다. 더 두꺼운 가장자리는 회전 방향으로 움직이는 앞 가장자리입니다. 후행 가장자리는 더 급격하게 부채꼴 모양이며 일반적으로 더 얇습니다.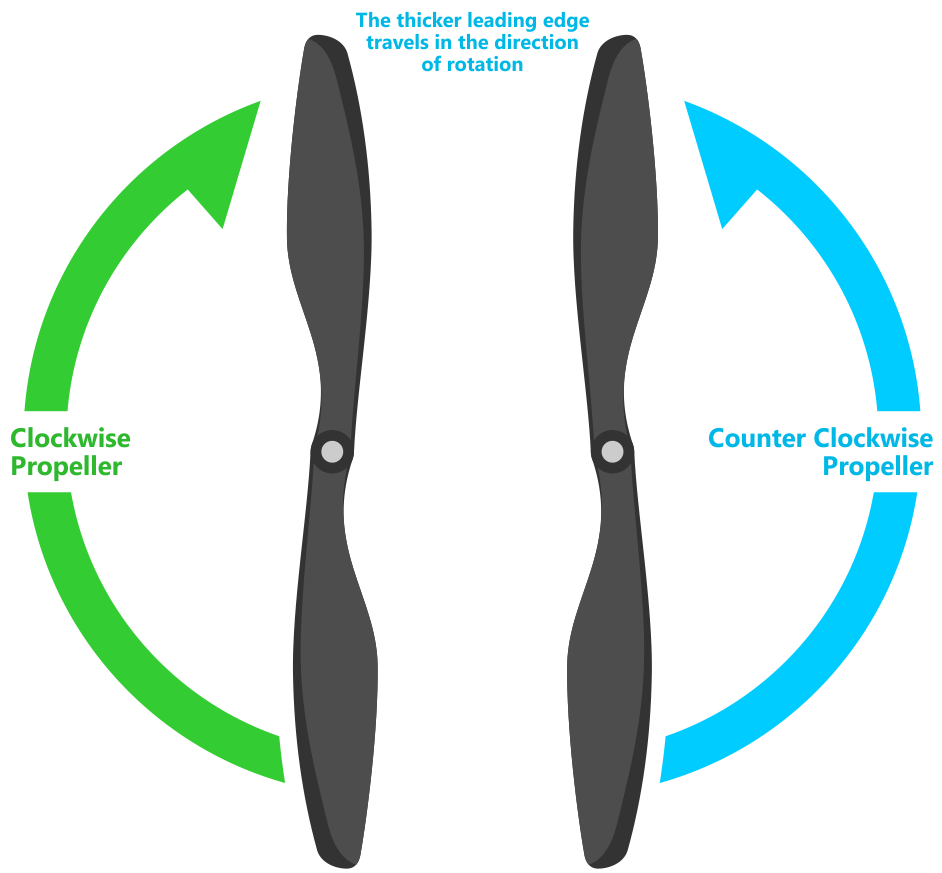
모터 회전 방향 테스트
라디오 및 ESC 보정을 완료한 경우 모터가 수정 방향으로 회전하는지 확인할 수 있습니다.
콥터에 프로펠러가 없는지 확인하세요!
송신기를 켜고 비행 모드 스위치가 Stabilize로 설정되어 있는지 확인하십시오.
배터리를 연결합니다.
스로틀을 아래로 누르고 방향타를 오른쪽으로 5초 동안 눌러 헬리콥터를 준비합니다.
스로틀을 오른쪽으로 내린 상태에서 준비에 실패하고 모터가 회전하지 않으면 사전 준비 안전 점검에 실패한 것일 수 있습니다.
사전 준비 안전 점검 실패는 빨간색 준비 표시등이 두 번 깜박인 다음 반복되는 것으로도 표시됩니다.
Pre-Arm 점검이 실패하면 Prearm Safety Check Page 로 이동하여 문제를 수정하거나 계속하기 전에 점검을 비활성화하십시오.
성공적으로 무장할 수 있을 때 소량의 스로틀을 적용하고 각 모터의 회전 방향을 관찰하고 기록합니다. 선택한 프레임에 대해 위의 이미지에 표시된 방향과 일치해야 합니다.
잘못된 방향으로 회전하는 모터를 뒤집으십시오.
팁
모터 방향은 단순히 두 개를 교환하여 반전됩니다.
3개의 ESC-모터 전원 리드.
Mission Planner 모터 테스트로 모터 번호 매기기 확인
모터가 올바르게 연결되었는지 확인하는 다른 방법은 Mission Planner 초기 설정 메뉴에서 "모터" 테스트를 사용하는 것입니다.
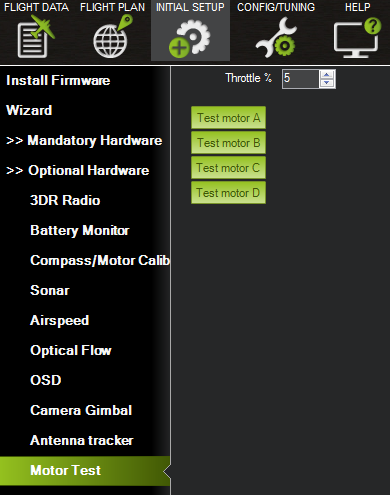
미션 플래너: 모터 테스트
MAVLink를 통해 차량에 연결된 경우 위에 표시된 녹색 버튼을 클릭하면 해당 모터가 5초 동안 회전합니다. 문자는 아래 예와 같이 모터 번호에 해당합니다.
소품을 먼저 벗으세요!
모터가 회전하지 않으면 "Throttle %"를 10%로 올리고 다시 시도하십시오. 작동하지 않으면 15%를 시도하십시오.
회전할 첫 번째 모터는 + 구성의 경우 바로 앞에 위치한 모터이거나 X 구성의 경우 직선의 오른쪽에 있는 첫 번째 모터입니다. 그러면 모터 테스트가 시계 방향으로 회전합니다.

X8의 경우 상단 전면 우측 모터를 먼저 회전시킨 다음 하단 전면 우측 모터를 회전시켜 동일한 패턴으로 진행합니다.
OctoV는 먼저 오른쪽 전면 모터를 회전시킨 다음 다시 전면 왼쪽 모터에 도달할 때까지 시계 방향으로 진행합니다.
배전판 사용
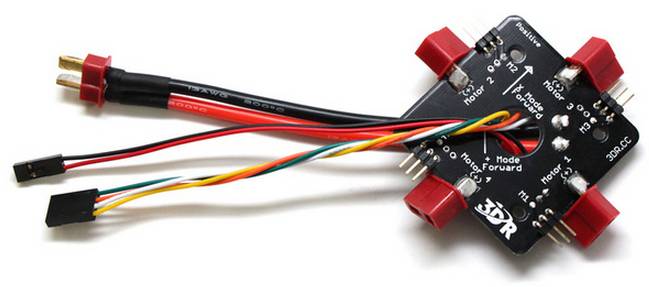
모터 출력을 연결하는 방법에는 두 가지가 있습니다. 전자 속도 컨트롤러(ESC)를 자동 조종 장치에 직접 연결하거나 배전반(PDB)을 사용하십시오.
PDB 사용 시 모터 번호에 따라 각 ESC의 전원(+), 접지(-), 신호(s)선을 PDB에 연결합니다. 모터의 할당된 순서를 결정하려면 아래에서 프레임 유형을 찾으십시오. 그런 다음 PDB의 신호 와이어를 자동 조종 장치의 주 출력 신호 핀에 연결합니다(모터 주문 번호가 컨트롤러의 주 출력 핀 번호와 일치하는지 확인). 전원 모듈을 사용하는 경우 PDB에서 자동 조종 장치 보드로 전원 및 접지선을 연결하는 것은 선택 사항입니다. 이 케이블을 전원 모듈과 함께 또는 대신 사용하거나 저전류 서보의 공통 지점으로 사용하려면 접지(-)선을 메인 출력 접지(-) 핀과 전원(+)선에 연결하십시오. 주 출력 전원(+) 핀에 연결합니다.
KDE(및 기타) Opto Isolated ESC
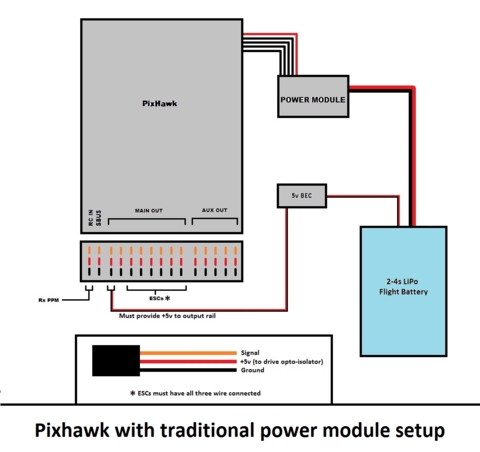
KDEXF-UAS 및 KDEF-UASHV 시리즈는 광절연형이며 주변 장비에 대한 BEC 전원 출력을 제공하지 않습니다. 광절연체에 전원을 공급하려면 +5V가 필요하며 Pixhawk는 서보 레일에서 전원을 공급받을 수 있지만 서보 레일에 +5V를 제공하지는 않습니다. ESC는 보드에서 사용하지 않는 커넥터의 점퍼 또는 BEC로 전원을 공급받아야 합니다. 점퍼보다는 BEC를 사용하여 레일에 전원을 공급하는 것이 좋습니다.
KDE ESC에는 PWM 범위가 고정되어 있으므로 플래너의 고급 매개변수 또는 전체 매개변수 설정 페이지를 사용하여 RCx_MIN이 1100이고 RCx_MAX가 1900us가 되도록 각 PWM 신호의 출력 범위를 수동으로 설정해야 합니다.
Pixhawk ESC 문제
일부 ESC는 Pixhawk에서 작동하지 않는 것으로 보고되었습니다.
Pixhawk는 일반 RC 수신기와 함께 작동하는 모든 ESC와 함께 작동해야 하지만(동일한 유형의 신호를 보내기 때문에) EMAX ESC라는 알려진 예외가 있습니다 .
대부분의 경우 문제는 잘못된 배선으로 인해 발생합니다. 항상 신호와 접지를 연결하십시오. ESC 유형을 확인하여 +5V 라인을 연결하는 방법을 결정하십시오. Pixhawk의 경우 ESC가 작동하려면 신호와 신호 접지를 모두 연결해야 합니다.
자세한 내용은 이 비디오를 참조하십시오 .
Last updated