나침반 보정
이 문서에서는 기본 나침반 보정을 수행하는 방법을 설명합니다. 시스템 내부 또는 외부에 최소 하나의 나침반이 있고 활성화되어 있다고 가정합니다. 자세한 정보 및 다른 나침반 관련 기능을 설정하려면 고급 나침반 설정을 참조하십시오 .
경고
나침반 보정이 완료되면 최상의 설정을 보장하기 위해 차량에 우수한 3D GPS 마운트 장치가 있어야 합니다. 필요한 경우 나침반 보정을 수행하기 전에 좋은 3D GPS 보정을 얻기 위해 야외로 이동하십시오.
메모
차량이 무장되어 있는 동안에는 나침반 보정을 수행할 수 없습니다.
팁
ArduPilot에는 재보정 없이 위치의 자북을 진북으로 변환할 수 있는 "world magnetic model"이 포함되어 있기 때문에 차량이 새 위치에서 비행할 때 나침반을 재보정할 필요가 없습니다. 또한 차량(드론)의 "기울기"는 시작 시 보정되고 이륙 직후 다시 보정됩니다.
교정 첫 단계
경고
금속성 또는 자기장을 생성하는 물체(컴퓨터, 휴대폰, 금속 책상, 전원 공급 장치 등) 근처에서 나침반을 보정하지 마십시오. 보정이 잘못될 수 있습니다.
설정 중 | 필수 하드웨어 선택 나침반 .
"inconsistent compasses" 사전 준비 메시지가 자주 표시되고 외부 나침반이 보정된 것이 확실한 경우 내부 나침반을 비활성화할 수 있습니다.
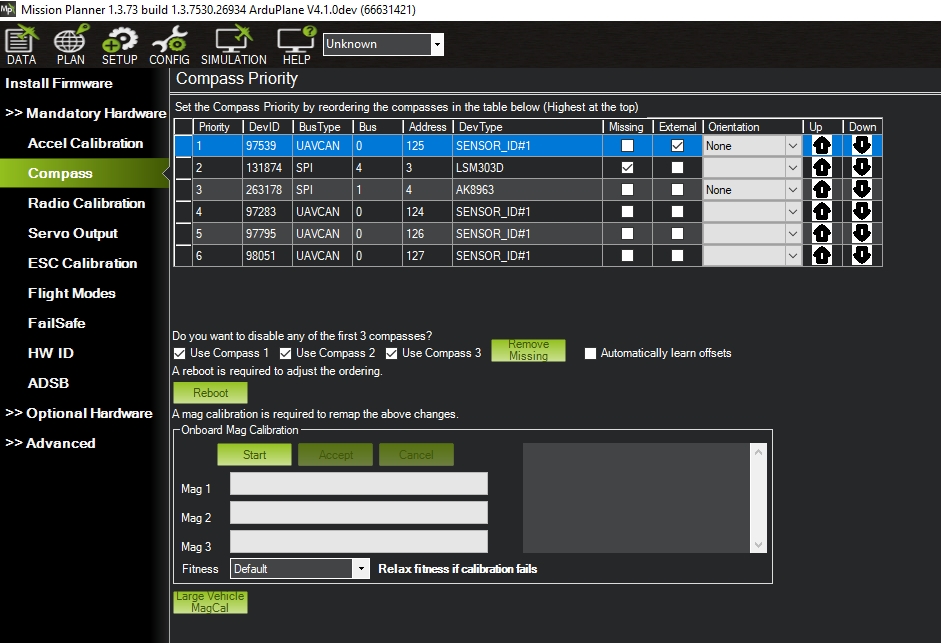
미션 플래너: 나침반 보정
온보드 보정(Onboard Calibration)
"온보드 보정"은 자동 조종 장치에서 실행되는 보정 루틴입니다. 이 방법은 오프셋 외에도 스케일링 및 방향도 자동으로 결정되기 때문에 지상국에서 실행되는 이전 "오프보드 보정"(일명 "라이브 보정")보다 더 정확합니다.
메모
자동조종장치 보드 방향 매개변수가 올바르지 않으면 온보드 나침반에 대한 보정이 실패할 수 있습니다 .
모든 나침반의 온보드 보정을 수행하려면:
"Onboard Mag Calibration" 섹션의 "Start" 버튼을 클릭합니다.
자동 조종 장치에 버저가 부착되어 있으면 단일 신호음과 초당 한 번씩 짧은 신호음이 들려야 합니다.
차량을 공중에 들고 각 측면(앞, 뒤, 왼쪽, 오른쪽, 위, 아래)이 차례로 지면을 향하도록 몇 초 동안 회전합니다. 360도 회전할 때마다 차량이 지면을 향하는 다른 방향을 가리키는 경우를 생각해 보십시오. 6번의 전체 회전과 약간의 추가 시간이 걸리고 처음에 통과하지 못한 경우 보정을 확인하거나 다시 시도합니다.

차량이 회전함에 따라 녹색 막대가 보정이 완료될 때까지 오른쪽으로 점점 더 확장되어야 합니다.
성공적으로 완료되면 3번의 상승음이 울리고 "Please reboot the autopilot" 창이 나타나고 차량을 무장하기 전에 자동 조종 장치를 재부팅해야 합니다.
보정에 실패한 경우:
"불쾌한" 실패 신호음이 들리고 녹색 막대가 왼쪽으로 재설정될 수 있으며 보정 루틴이 다시 시작될 수 있습니다(지상국에 따라 다름). 미션 플래너는 자동으로 재시도하므로 위에서 설명한 대로 차량을 계속 회전합니다.
나침반이 보정되지 않는 경우 자기 교란에서 멀리 떨어진 다른 지역으로 이동하고 주머니에서 전자 장치를 제거하십시오.
여러 번 시도한 후에도 나침반이 보정을 통과하지 못한 경우 "취소" 버튼을 누르고 "Fitness" 드롭다운을 좀 더 편안한 설정으로 변경하고 다시 시도하십시오.
나침반 보정이 계속 실패하면 COMPASS_OFFS_MAX를 850에서 2000 또는 3000으로 높이는 데 도움이 될 수 있습니다.
마지막으로, 하나의 나침반이 보정되지 않고 다른 나침반을 신뢰하는 경우 비활성화하십시오.
RC 스위치를 사용한 온보드 보정
온보드 보정은 위의 미션 플래너 기술을 사용하는 대신 RC 스위치를 사용하여 시작할 수 있습니다. 이렇게 하면 USB 케이블이 엉키지 않고 교정할 수 있습니다.
RCx_OPTION"171"로 설정하여 보정을 시작하도록 RC 채널을 설정합니다 . 채널의 값이 높으면 모든 나침반 보정이 시작되고 위와 같이 차량을 이동하게 됩니다. 값이 낮으면 보정이 취소됩니다. 위의 성공 또는 실패에 대한 톤이 방출됩니다.
대형 차량 MagCal
크거나 무거운 차량은 모든 축에서 회전하는 것이 비실용적입니다. 이 기능은 자동조종 장치에서 GPS 잠금이 활성화되어 있고 차량의 실제 방향을 알고 있는 경우 Mission Planner 지도의 랜드마크 참조를 사용하거나 다른 나침반(예: 휴대폰)을 사용하고 차량 방향을 입력하는 경우 상당히 정확한 보정을 허용합니다.
메모
입력한 제목은 MAGNETIC이 아니라 TRUE여야 합니다. 휴대폰의 나침반 앱을 사용하려면 일반적으로 입력해야 하는 TRUE 지리적 표제를 얻기 위해 판독값에 로컬 편각 값을 추가해야 합니다. 이 방법이 작동하려면 나침반의 올바른 방향도 설정해야 합니다.
나침반 우선순위
원하는 경우 페이지 상단에서 연결된 나침반의 우선 순위를 변경할 수 있습니다.
추가 정보
나침반 구성에 대한 자세한 내용은 고급 나침반 설정 에서 찾을 수 있습니다 . 여기에는 추가 나침반 설정 방법, 오프셋 자동 설정 , 비표준 나침반 정렬, compassmot 등에 대한 지침이 포함됩니다.
자기 간섭 및 이를 줄이는 방법에 대한 일반적인 논의는 자기 간섭 에서 찾을 수 있습니다 .
Last updated