모터 범위 설정
대부분의 ESC는 범위 하단에 데드 존이 있습니다. 이 페이지에서는 범위의 크기를 테스트한 다음 무장 시 스핀 및 최소 스로틀 값을 적절하게 설정하는 방법을 설명합니다.
필수는 아니지만 고급 사용자는 모터 추력 곡선을 측정하고 조정하여 다음 단계를 수행할 수 있습니다 .
메모
모터 범위를 설정하기 전에 ESC 보정을 완료하십시오.
데드존 측정
차량에서 프로펠러를 제거하십시오.
LiPo 배터리 연결
USB 케이블 또는 원격 측정을 사용하여 자동 조종 장치를 Mission Planner에 연결
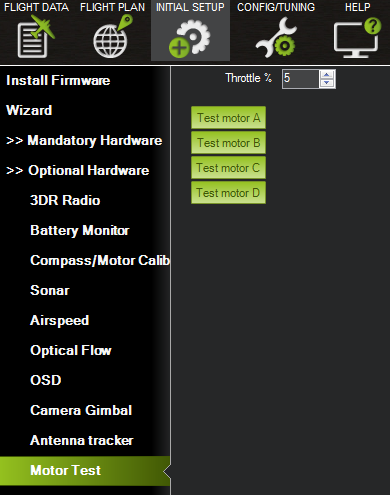
Mission Planner의 초기 설정 >> 옵션 하드웨어 >> 모터 테스트 페이지를 엽니다.
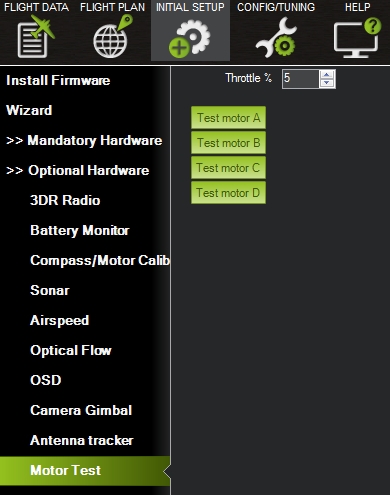
"Throttle %" 필드를 늘리고 각 "Test motor" 버튼을 눌러 각 모터가 회전하는 데 필요한 백분율을 결정합니다. 모든 ESC가 동일한 제조업체에서 생산된 경우 모두 유사한 데드 존을 가질 가능성이 높지만 하나 또는 두 개가 1% ~ 2% 정도 다른 것이 일반적입니다. 모든 모터 중 가장 높은 비율을 선택합니다. 아래에서 이를 사용합니다.
Spin-Armed 및 Min Throttle 설정
기본적으로 차량이 무장되어 있지만 비행하지 않는 경우 모터는 정상 속도보다 약간 느리게 회전합니다. 이 속도는 MOT_SPIN_ARM 매개변수를 사용하여 구성할 수 있습니다 (이전 버전의 경우 MOT_SPIN_ARMED 확인). 일단 비행체가 비행하면 모터가 회전을 멈추게 하는 값을 출력하지 않도록 해야 합니다. 이 하한값은 MOT_SPIN_MIN 매개변수를 구성할 수 있습니다.
MOT_SPIN_ARM 매개변수를 (위에서 발견된 비율 + 2%) / 100 으로 설정합니다 . 즉, ESC의 데드존이 7%인 경우 MOT_SPIN_ARM을 0.09(예: (7 + 2) / 100)로 설정합니다.
MOT_SPIN_MIN 매개변수를 MOT_SPIN_ARM 보다 최소 0.03 이상 높게 설정하십시오 . 즉, MOT_SPIN_ARM이 0.09인 경우 MOT_SPIN_MIN을 0.12로 설정합니다.
메모
MOT_SPIN_MIN을 위에서 권장한 것보다 더 높게 설정하는 것은 배터리의 전압 강하를 고려하려는 경우 허용되지만 너무 높게 설정하면 모터의 낮은 범위가 줄어들어 특히 낮은 호버링 스로틀이 있는 강력한 헬리콥터에서 중요할 수 있는 제어가 감소합니다. .
MOT_SPIN_MAX 매개변수는 일반적으로 추가 추력을 생성하지 않는 ESC/모터 범위의 최상위를 설명합니다. 기본적으로 이 값은 0.95입니다(즉, 범위의 상위 5%는 추가 추력을 생성하지 않음).
ESC RPM 원격 측정(Telemetry)을 사용하는 경우 TKOFF_RPM_MIN 매개변수를 MOT_SPIN_ARM 매개변수 보다 약간 낮게 설정하여 하나 이상의 모터가 회전하지 않는 경우 이륙 시도 및 후속 플립을 방지할 수 있습니다.
Last updated