전자 속도 컨트롤러(ESC) 보정
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
전자 속도 컨트롤러는 자동 조종 장치가 요청한 속도로 모터를 회전시키는 역할을 합니다. 대부분의 ESC는 비행 컨트롤러가 보낼 최소 및 최대 pwm 값을 알 수 있도록 보정해야 합니다. 이 페이지는 ESC 보정 지침을 제공합니다.
메모
ESC 보정을 수행하기 전에 무선 보정을 완료하십시오 .
ESC 보정 정보
ESC 보정은 사용 중인 ESC 브랜드에 따라 달라지므로 특정 정보(톤 등)에 대해서는 항상 사용 중인 ESC 브랜드 문서를 참조하십시오. "한 번에" 보정은 대부분의 ESC에서 잘 작동하므로 먼저 시도하고 실패하면 "수동 ESC-by-ESC" 방법을 시도하는 것이 좋습니다.
ESC 유형에 따른 ESC 프로토콜( MOT_PWM_TYPE ) 설정은 PWM, OneShot 및 OneShot125 ESC를 참조하십시오 .
DJI Opto ESC와 같은 일부 ESC는 보정이 필요하지 않으며 지원하지 않으므로 이 페이지를 완전히 건너뛰십시오.
DShot과 같은 디지털 esc 프로토콜을 사용하거나 CAN ESC를 사용하는 경우 보정할 필요가 없으므로 이 페이지를 건너뛰십시오. 그러나 ESC 설정 끝에 있는 섹션은 여전히 적용 가능합니다.
ESC의 일부 브랜드는 보정을 허용하지 않으며 최소 스로틀이 약 1000 PWM이고 최대가 약 2000이 되도록 라디오의 스로틀 끝점을 조정하지 않으면 작동하지 않습니다. TX의 끝점을 변경하는 경우 반드시 무선 보정을 다시 수행하십시오 . 또는 수동으로 MOT_PWM_MIN을 1000으로, MOT_PWM_MAX를 2000으로 설정할 수 있습니다.
이 절차는 무선 제어 보정을 완료 하고 Autopilot 시스템 조립 지침 의 ESC와 모터 연결 부분 을 완료한 후에만 시작하십시오 . 다음 단계를 따르십시오.
안전 점검!
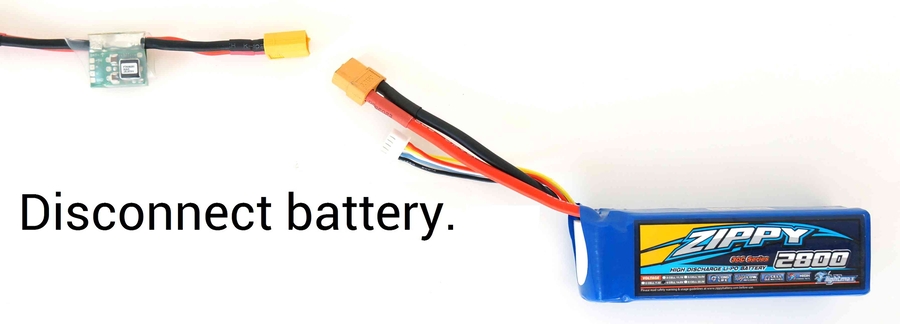
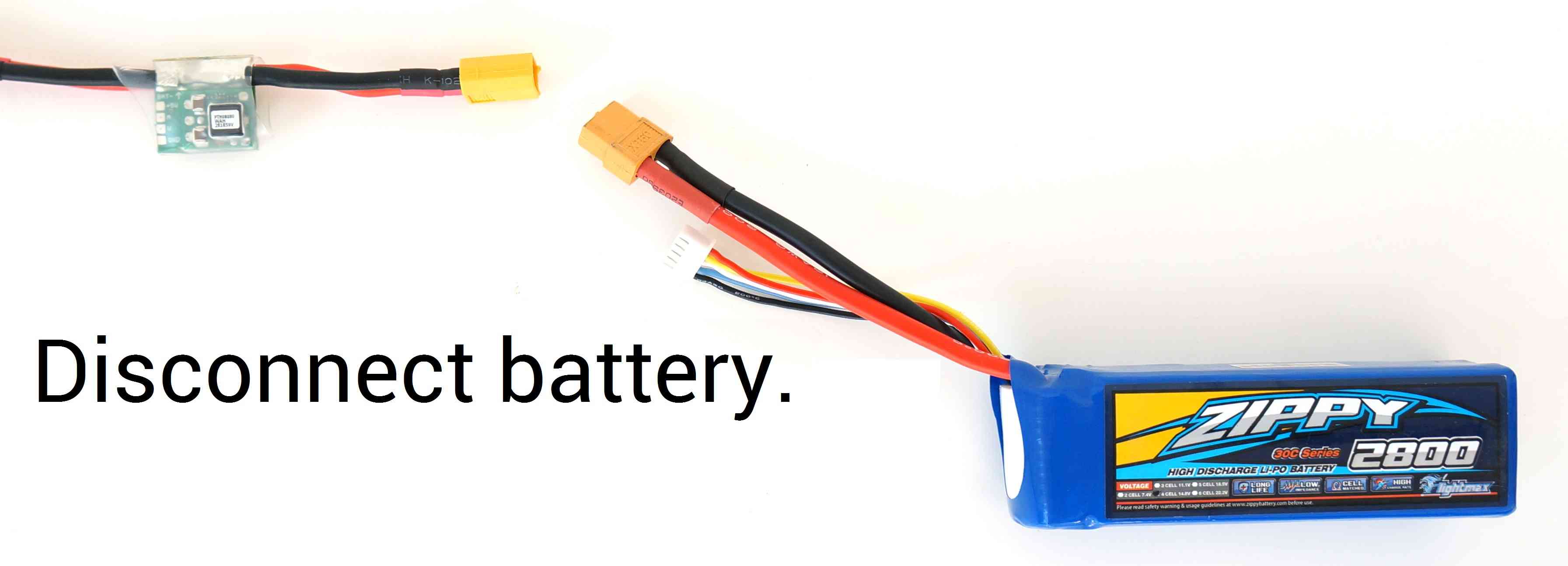
ESC를 보정하기 전에 콥터에 PROPS가 없는지, 자동 조종 장치가 USB를 통해 컴퓨터에 연결되어 있지 않고 Lipo 배터리가 분리되어 있는지 확인하십시오.


ESC 보정 절차
송신기를 켜고 스로틀 스틱을 최대로 놓으십시오.

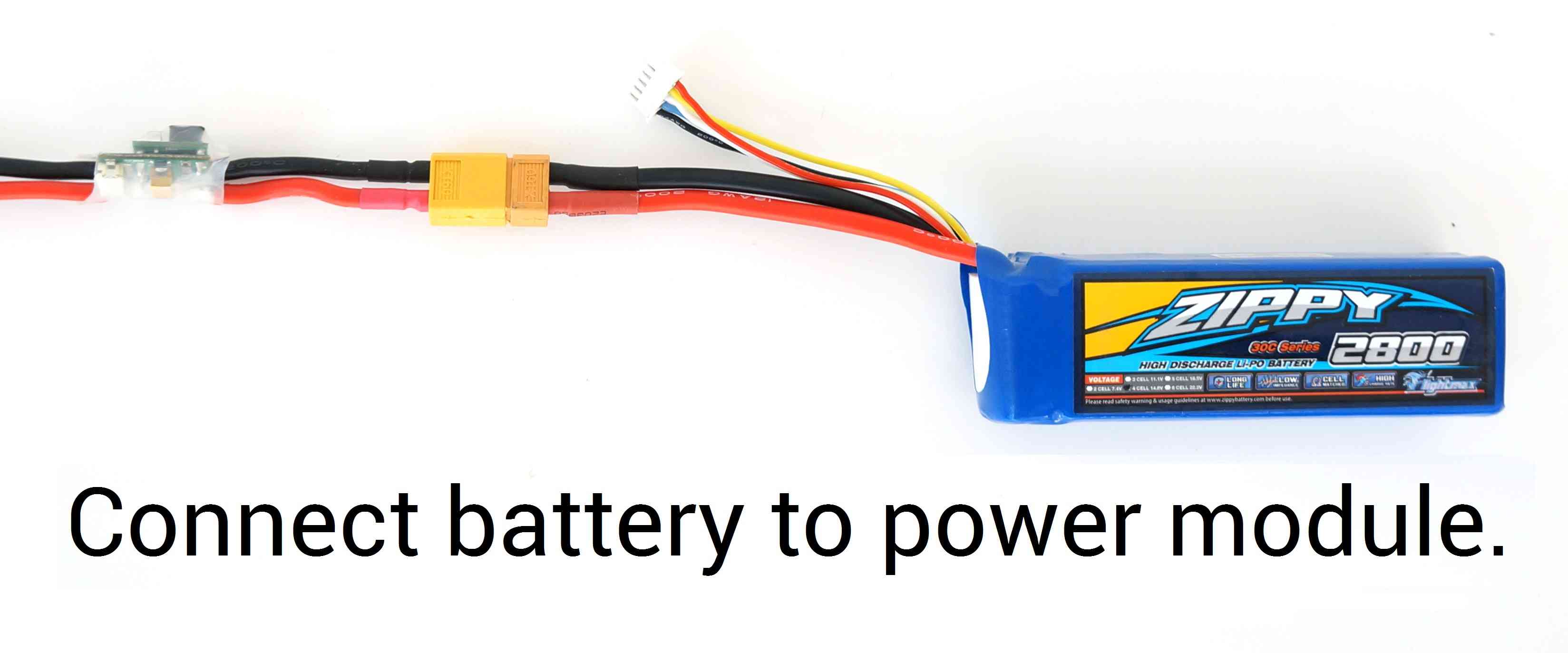
Lipo 배터리를 연결합니다. 자동 조종 장치의 빨간색, 파란색 및 노란색 LED가 주기적인 패턴으로 켜집니다. 이는 다음에 플러그를 꽂을 때 ESC 보정 모드로 들어갈 준비가 되었음을 의미합니다.

송신기 스로틀 스틱이 여전히 높은 상태에서 배터리를 분리했다가 다시 연결하십시오.
안전 스위치가 있는 오토파일럿의 경우 LED가 빨간색으로 표시될 때까지 누르십시오.
자동 조종 장치는 이제 ESC 보정 모드에 있습니다.
ESC가 음악 소리를 낼 때까지 기다립니다. 배터리 셀 수를 나타내는 일정한 수의 경고음(예: 3S의 경우 3번, 4S의 경우 4번)과 최대 스로틀이 캡처되었음을 나타내는 추가 경고음 두 번입니다.
송신기의 스로틀 스틱을 최소 위치로 당깁니다.

그런 다음 ESC는 최소 스로틀이 캡처되고 보정이 완료되었음을 나타내는 긴 신호음을 내야 합니다.
성공적인 보정을 나타내는 긴 신호음이 들리면 ESC가 "활성화"되고 스로틀을 약간 올리면 회전해야 합니다. 스로틀을 약간 올렸다가 다시 내려 모터가 회전하는지 테스트합니다.
스로틀을 최소로 설정하고 배터리를 분리하여 ESC 보정 모드를 종료합니다.


수동 ESC-by-ESC 보정
ESC 3선 케이블 중 하나를 RC 수신기의 스로틀 채널에 연결합니다. (일반적으로 채널 3입니다.)
송신기를 켜고 스로틀 스틱을 최대로 설정합니다(최대).
LiPo 배터리 연결
음악 톤과 두 번의 비프음이 들립니다.
삐 소리가 두 번 난 후 스로틀 스틱을 끝까지 내립니다.
그런 다음 여러 번의 경고음(사용 중인 각 배터리 셀에 대해 하나씩)이 들리고 마지막으로 끝점이 설정되고 ESC가 보정되었음을 나타내는 단일 긴 경고음이 들립니다.
배터리를 분리합니다. 모든 ESC에 대해 이 단계를 반복합니다.
ESC가 보정되지 않은 것으로 나타나면 송신기의 스로틀 채널을 반대로 해야 할 수 있습니다.
이러한 방법을 시도한 후에도 여전히 문제가 있는 경우(예: ESC에서 계속 경고음이 계속 울림) 스로틀 트림을 50% 낮추십시오.
또한 USB를 통해 ArduPilot 보드에 전원을 공급하여 LiPo를 연결하기 전에 먼저 부팅할 수 있습니다.
반자동 ESC-by-ESC 교정
Mission Planner와 같은 지상국에서 자동 조종 장치에 연결하고 ESC_CALIBRATION 매개변수를 3으로 설정합니다.
자동 조종 장치의 전원이 꺼지도록 배터리와 USB 케이블을 분리합니다.
배터리 연결
무장 신호음이 재생됩니다(차량에 부저가 부착된 경우).
안전 버튼이 있는 자동조종 장치(Pixhawk와 같은)를 사용하는 경우 빨간색으로 표시될 때까지 누르십시오.
음악 톤이 들린 다음 두 번의 비프음이 들립니다.
몇 초 후에 여러 번의 경고음(사용 중인 각 배터리 셀에 대해 하나씩)이 들리고 마지막으로 끝점이 설정되고 ESC가 보정되었음을 나타내는 단일 긴 경고음이 들립니다.
배터리를 분리하고 정상적으로 전원을 다시 켜고 아래 설명된 대로 테스트합니다.
테스트
ESC를 보정한 후에는 LiPo를 연결하여 테스트할 수 있습니다. 기억하세요: 프로펠러가 없습니다!
송신기의 비행 모드 스위치가 "안정화 모드"로 설정되어 있는지 확인하십시오.
소량의 스로틀을 주십시오. 모든 모터는 거의 같은 속도로 회전해야 하며 동시에 시작해야 합니다. 모터가 모두 동시에 시작되지 않고 동일한 속도로 회전하지 않으면 ESC가 여전히 제대로 보정되지 않은 것입니다.
헬리콥터를 무장 해제하세요
참고 / 문제 해결
All-at-once ESC 캘리브레이션 모드는 단순히 오토파일럿이 파일럿의 스로틀을 통과하여 ESC로 직접 전달되도록 합니다. 이 모드에서 자동 조종 장치의 전원을 켜면 모든 ESC에 동일한 PWM 신호를 보냅니다. 그게 전부입니다. 많은 ESC는 시작 시 풀 스로틀을 사용하여 프로그래밍 모드로 들어가고 풀 스로틀 위치는 상단 끝점으로 저장되며 스로틀을 0으로 내리면 해당 위치가 하단 끝점으로 저장됩니다.
보정 후 모터가 같은 속도로 회전하지 않거나 동시에 시작하지 않으면 보정 프로세스를 반복하십시오. 위의 자동 보정을 시도했지만 작동하지 않거나 ESC가 모터를 동일하게 구동하지 않는 경우 위에서 설명한 수동 보정 방법을 시도하십시오. 거의 매번 작동합니다. (거의 전체 수동 보정 후 최종 자동 보정을 추가로 수행해야 할 수도 있습니다).
마지막으로, 수많은 브랜드와 ESC 유형이 있으며 그 중 일부는 일반 프로그래밍 규칙을 준수하지 않으며(때로는 그렇게 주장하지만) ArduPilot과 현재의 방식으로 작동하지 않을 수 있습니다. 이것은 불행히도 필요하지만 진정한 면책 조항입니다.
권장 ESC 설정
브레이크 정지"Brake on stop" : OFF
활성 제동 "Damped light": 켜짐 ("Non Damped mode" OFF로 설정)
저 전압 보호 "Low voltage protection" : OFF
컷오프 "CutOff" 모드: 소프트 컷(기본값)
컷오프 "CutOff Threshold" 임계값: 낮음
Start Mode: 일반(기본값)
타이밍 "Timing" : 중간
Last updated