무선 제어 보정
개요
RC 송신기를 통해 조종사는 비행 모드를 설정하고 차량의 움직임과 방향을 제어하며 보조 기능(예: 랜딩 기어 올리기 및 내리기 등)을 켜거나 끌 수 있습니다.
RC 보정에는 ArduPilot이 입력을 올바르게 해석할 수 있도록 각 RC 입력 채널의 최소, 최대 및 "트림" 값을 캡처하는 작업이 포함됩니다.
송신기 설정 확인
배터리가 분리되었는지 확인합니다(RC 보정 프로세스 중에 실수로 차량을 활성화할 수 있기 때문에 중요합니다).
RC 수신기가 자동 조종 장치에 연결되어 있는지 확인하십시오.
RC 송신기를 켜고 "트림 탭"이 있는 경우 중앙에 있는지 확인하십시오.
USB 케이블을 사용하여 자동 조종 장치를 PC에 연결
미션 플래너에서 "연결" 버튼을 누르고 미션 플래너의 초기 설정 | 필수 하드웨어 | 무선 보정 화면
ArduPilot이 송신기/수신기에서 입력을 수신하고 있음을 나타내는 일부 녹색 막대가 나타나야 합니다. 막대가 나타나지 않으면 수신기의 LED를 확인하십시오.
표시등이 없으면 자동 조종 장치에 잘못 연결되었음을 나타낼 수 있습니다. 거꾸로 삽입되었을 수 있는 커넥터를 찾으십시오.
빨간색 또는 깜박이는 LED는 RC 송신기/수신기를 바인딩해야 함을 나타낼 수 있습니다. 지침은 RC 장비와 함께 제공된 설명서를 참조하십시오.

스틱, 노브 및 스위치를 이동하고 어떤 녹색 막대(있는 경우)가 움직이는지 관찰하여 송신기의 채널 매핑을 확인합니다(즉, 송신기의 스틱, 스위치 및 노브로 제어되는 입력 채널 확인). ArduPilot과 함께 송신기를 처음 사용하는 경우 송신기의 채널 매핑을 변경해야 할 가능성이 높으며 일반적으로 내장 구성 메뉴를 사용하여 송신기 자체에서 수행됩니다.
송신기가 Mode1인지 Mode2인지 확인합니다(아래 참조).
롤 스틱은 채널 1을 제어해야 합니다.
피치 스틱은 채널 2를 제어해야 합니다.
스로틀 스틱은 채널 3을 제어해야 합니다.
요 스틱은 채널 4를 제어해야 합니다.
3위치 스위치(비행 모드 제어용)는 채널 5(콥터를 사용하는 경우) 또는 채널 8(로버 또는 비행기를 사용하는 경우)을 제어하도록 설정해야 합니다. 이 채널은 FLTMODE_CH 매개변수를 설정하여 이동할 수 있습니다.
Copter에서 튜닝 노브는 채널 6을 제어해야 합니다.
Copter 및 Rover에서 나머지 2개 또는 3개의 위치 스위치는 채널 7~12에 매핑하여 보조 기능을 제어하도록 설정할 수 있습니다.
송신기의 롤, 피치, 스로틀 및 요 스틱을 움직여 녹색 막대가 올바른 방향으로 움직이는지 확인합니다.
롤, 스로틀 및 요 채널의 경우 녹색 막대가 송신기의 물리적 스틱과 같은 방향으로 움직여야 합니다.
피치의 경우 녹색 막대가 송신기의 물리적 스틱과 반대 방향으로 움직여야 합니다.
녹색 막대 중 하나가 잘못된 방향으로 움직이면 송신기 자체의 채널을 반전시킵니다. 송신기에서 채널을 바꿀 수 없는 경우 "Reversed" 확인란을 선택하여 ArduPilot에서 채널을 바꿀 수 있습니다(비행기 및 로버만 해당). 확인란이 보이지 않으면 RCx_REVERSED 매개변수를 직접 변경하여 채널을 반전시킬 수 있습니다(여기서 "x"는 1에서 4까지의 입력 채널임).
구경 측정
Mission Planner의 초기 설정 열기 | 필수 하드웨어 | 무선 보정 화면
오른쪽 하단의 녹색 "Calibrate Radio" 버튼을 클릭합니다.
무선 제어 장비가 켜져 있는지, 배터리가 연결되어 있지 않은지, 프로펠러가 부착되어 있지 않은지 확인하라는 메시지가 표시되면 "확인"을 누르십시오.

송신기의 조종 스틱, 노브 및 스위치를 한계까지 이동하십시오. 지금까지 본 최소값과 최대값을 표시하기 위해 보정 막대에 빨간색 선이 나타납니다.

완료되면 클릭 선택
"모든 스틱이 중앙에 있고 스로틀이 아래에 있는지 확인하고 확인을 클릭하여 계속하십시오"라는 메시지가 있는 창이 나타납니다. 스로틀을 0으로 이동하고 "확인"을 누릅니다.
Mission Planner는 보정 데이터의 요약을 표시합니다. 정상적인 값은 최소값이 약 1100이고 최대값이 1900입니다.

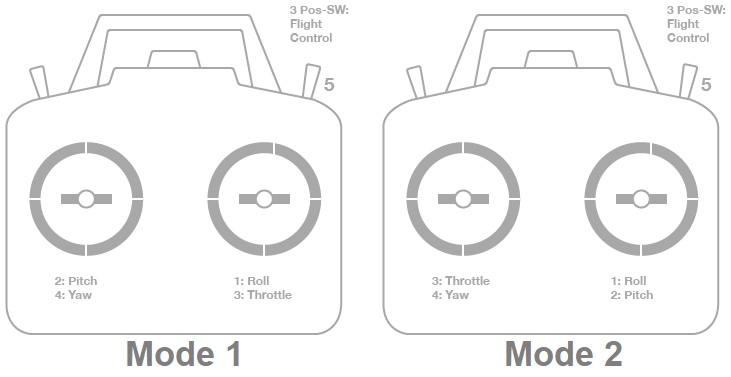
Mode1 및 Mode2 송신기
두 가지 주요 송신기 구성이 있습니다.
모드 1 : 왼쪽 스틱은 피치와 요를 제어하고 오른쪽 스틱은 스로틀과 롤을 제어합니다.
모드 2 : 왼쪽 스틱은 스로틀과 요를 제어합니다. 오른쪽 스틱은 피치와 롤을 제어합니다.
채널 매핑
Copter 기본 채널 매핑은 다음과 같습니다.
채널 1 : 롤
채널 2 : 피치
채널 3 : 스로틀
채널 4 : 요
채널 5 : 비행 모드
채널 6 : (옵션) 기내 튜닝 또는 카메라 마운트(송신기 튜닝 노브에 매핑됨)
채널 7 ~ 12 : (옵션) 보조 기능 스위치
참고 자료
롤, 피치, 스로틀 및 요 채널 매핑은 RCMAP 입력 채널 매핑을 사용하여 변경할 수 있습니다.
각 스위치 위치에 의해 활성화되는 차량 모드를 지정하는 비행 모드 스위치 설정은 RC 송신기 비행 모드 구성 페이지 에서 찾을 수 있습니다.
Last updated