RC 송신기 비행 모드 구성
비행 모드 구성
스위치 위치와 비행 모드 간의 매핑은 Mission Planner 비행 모드 화면에서 설정됩니다.

다음을 수행하여 송신기에서 사용 가능한 비행 모드를 설정할 수 있습니다.
RC 송신기를 켜십시오
Pixhawk(또는 다른 자동 조종 장치)를 Mission Planner 에 연결
초기 설정 | 필수 하드웨어 | 비행 모드 화면
메모
송신기의 비행 모드 스위치를 움직이면 녹색 하이라이트 바가 다른 위치로 이동합니다.
각 줄의 드롭다운을 사용하여 해당 스위치 위치에 대한 비행 모드를 선택합니다.
(Copter) 적어도 하나의 스위치 위치가 STABILISE에 지정되었는지 확인하십시오.
(콥터) 선택적으로 해당 스위치 위치에 대한 단순 모드 확인란을 선택합니다. 선택적으로 Super Simple 모드를 설정할 수 있습니다 . Simple 모드와 Super Simple 모드 확인란을 모두 선택하면 Super Simple이 사용됩니다.
완료되면 저장 모드 버튼을 누릅니다.
(콥터) 일부 모드는 보조 스위치 (일명 ch7, ch8 옵션 스위치) 에서도 호출할 수 있습니다 . 예를 들어 RTL 전용 스위치를 설정합니다.
비행 모드 채널 설정
비행 모드 채널은 ArduPilot이 모드 변경을 모니터링하는 입력 라디오 채널입니다.
Copter에서는 FLTMODE_CH 매개변수를 사용하여 구성할 수 있습니다 .
송신기 구성
송신기는 모드를 스위치 위치에 매핑할 수 있도록 올바른 범위에서 PWM 신호를 방출해야 합니다.
메모
일반적으로 범위는 1000~2000us(1.0~2.0ms)입니다.ms = 밀리초us = 마이크로초
선택 가능한 모드에 대한 올바른 PWM 범위는 Mission Planner 비행 모드 화면 의 각 모드 선택 드롭다운 옆에 표시됩니다 ( 위 스크린샷 참조 ).
세 가지 모드(세 위치 스위치 사용)만 지원하려는 경우 각 스위치 위치에 대해 1165, 1425 및 1815us의 PWM 펄스 폭을 생성하도록 송신기를 구성합니다.
6가지 모드를 지원하려면 송신기에서 약 1165, 1295, 1425, 1555, 1685 및 1815us의 PWM 폭을 방출해야 합니다. 일반적으로 이것은 2위치 스위치와 3위치 스위치를 혼합하도록 송신기를 구성하여 달성됩니다(총 6개 모드 제공). 사용 가능한 경우 아날로그 다이얼로도 이 작업을 수행할 수 있지만 다이얼을 6가지 개별 설정에 대해 올바른 위치로 안정적으로 돌리는 것은 어렵습니다.
아래 섹션에서는 다양한 제조업체의 송신기를 구성하는 방법과 각 스위치 설정이 적절한 PWM 신호를 방출하는지 테스트하는 방법(Mission Planner에서)을 보여주는 링크를 제공합니다.
송신기 스위치 설정 테스트
Mission Planner 무선 보정 화면을 사용하여 각 모드 설정에 대한 PWM 펄스 폭을 테스트할 수 있습니다.
송신기의 모드를 전환하고 선택한 채널의 PWM이 필요한 PWM 값과 일치하는지 확인하십시오. 아래 스크린샷은 비행 모드 채널이 라디오 5로 설정되어 있다고 가정합니다.

특정 RC 하드웨어에 대한 자습서
다음은 다양한 RC 시스템을 사용하여 이 작업을 수행(또는 2위치 토글만으로 RC 장치에 더 많은 모드 추가)하기 위한 몇 가지 사용자 기여 자습서입니다.
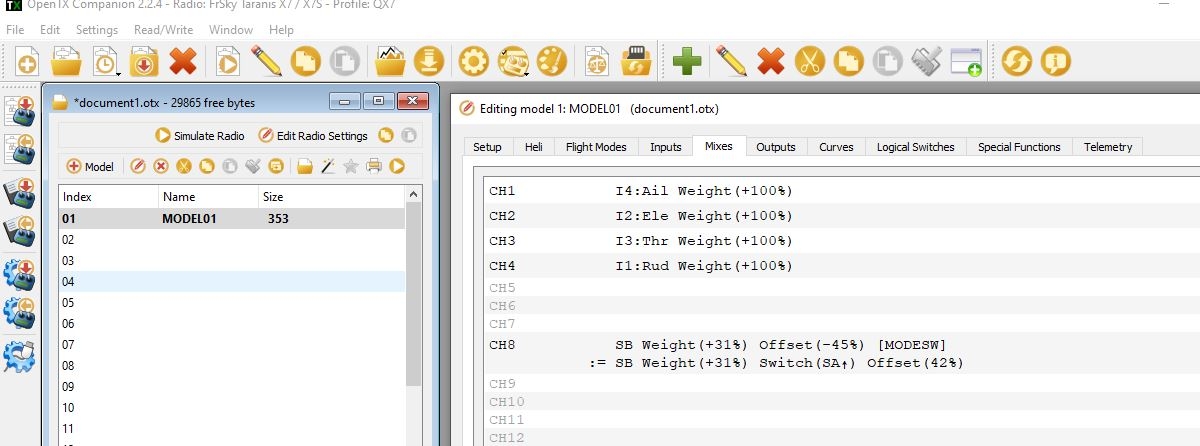
모든 OpenTX 기반 송신기:
두 개의 스위치(하나는 세 위치여야 함)를 선택하고 차량에 사용되는 적절한 비행 모드 채널에 이러한 믹스를 추가하기만 하면 됩니다. 아래 예는 비행기에서 비행 모드(기본값)로 채널 8을 사용하고 SA 스위치를 올린 상태에서 세 가지 비행 모드를 선택하는 스위치 SB를 사용하고 SA가 위쪽 위치에 있지 않을 때 SB를 통해 추가로 세 가지 비행 모드를 선택하는 비행기에 대해 보여줍니다.
Spectrum DX8(대체 방법)
이 섹션에서는 Spektrum DX8로 6가지 모드를 설정하는 다른 방법을 설명합니다. 이 방법은 기어 스위치와 비행 모드 스위치를 사용합니다. 다른 모든 스위치는 기본 설정으로 할당할 수 있습니다. 또한 이 방법을 사용하면 각 모드를 각 모드의 펄스 폭 범위 중간에 설정할 수 있으므로 작은 변경으로 모드가 변경되지 않습니다. 이러한 조정을 위해 현재 PWM을 모니터링하려면 Mission Planner 비행 모드 설정을 사용하십시오.
스위치 설정(6개 모드에 필요)
롤러 바를 누른 상태에서 DX8을 켜고 스위치 선택까지 아래로 스크롤하고 롤러 바를 클릭합니다. 다음과 같이 스위치를 설정합니다.
기어 = 기어(채널 5)
FMode = Inh 채널에 할당되지 않음 – 6개 모드에 대해 Gear Sw(채널 5)와 혼합하는 데 사용됨
어쨌든 당신이 원하는 다른 사람. 한 가지 방법은 다음과 같습니다.
aux1에 대한 노브 = 카메라 틸트/튜닝을 위한 채널 6
Mix = aux2 = APM 구성에서 Way Point 또는 RTL, 자동 트림 또는 기타 설정을 저장하는 채널 7.
aux3에 대한 플랩 = 다른 용도의 채널 8
일반 화면이 나타날 때까지 BACK을 클릭하거나 전원을 껐다가 다시 켭니다.
채널 5(기어 스위치로 제어되는 기어 채널)에 대한 비혼합 서보 설정을 설정합니다.
이것은 혼합이 없는 값이 됩니다. - F 모드 스위치는 0 위치에 있고 가장 낮은 펄스 폭을 1165us(모드 1)로 설정하고 가장 높은 펄스 폭을 1815us(모드 6)로 설정합니다.
롤러 바를 클릭하고 아래로 스크롤하여 서보 설정, 기어 채널 선택, 하위 트림 선택을 선택합니다.
하위 트림을 0으로 설정
여행을 선택합니다.
1165us 펄스(~90%)에 대해 이동(왼쪽, 위치 0)을 설정합니다.
트래블을 설정합니다(오른쪽, 1815us 펄스의 위치 1(~74%).
F 모드가 위치 1에 있을 때 기어 펄스 폭을 변경하도록 믹스 1을 설정합니다.
롤러를 클릭하고, 혼합으로 아래로 스크롤하고, 롤러를 클릭하고, 혼합 아래의 첫 번째 줄로 스크롤(xxx > xxx, AIL > RUD 또는 다른 혼합 세트가 있음), 롤러를 클릭하고, 혼합 1을 선택하고, 롤러를 클릭합니다.
믹스 설정: 기어 > 기어. 스위치 F 모드 설정에 따라 기어 변경
오프셋 = 0, 트림 = 인치로 설정합니다.
SW = FM 1로 설정
송신기의 F 모드 스위치를 위치 1로 설정합니다.
송신기의 기어 스위치를 위치 0으로 설정합니다.
모드 2(~-35%)의 경우 펄스 폭 1290us의 최고 속도 설정
(변경 = 400us * -90% * -35% = 126us. 결과 = 1165us + 126us = 1251us = 모드 2)
송신기의 기어 스위치를 위치 1로 설정합니다.
모드 5(~– 45%)에 대해 1685us의 펄스 폭에 대한 하단 속도 설정
(변경 = 400us * +73% *- 45% = -131us. 결과 = 1815us - 131us = 1684us = 모드 5)
F 모드가 위치 2에 있을 때 기어 펄스 폭을 변경하도록 믹스 2를 설정합니다.
믹스: 기어 > 기어. 스위치 F 모드 설정에 따라 기어가 변경됩니다.
오프셋 = 0, 트림 = 인치로 설정
SW = FM2로 설정
송신기의 F 모드 스위치를 위치 2로 설정합니다.
송신기의 기어 스위치를 위치 0으로 설정합니다.
모드 3의 경우 펄스 폭 1425us의 최고 속도(~–72%)(변경 = 400us * –90% * – 72% = 259us. 결과 = 1165us + 259us = 1424us = 모드 3)
송신기의 기어 스위치를 위치 1로 설정합니다.
모드 4(~–89%)의 펄스 폭 1550us에 대한 하단 속도 설정(변경 = 400us * +73% * – 89% = -262us. 결과 = 1815us - 262us = 1553us = 모드 4)
Last updated