일반적인 자동 조종 장치 배선 연결
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo
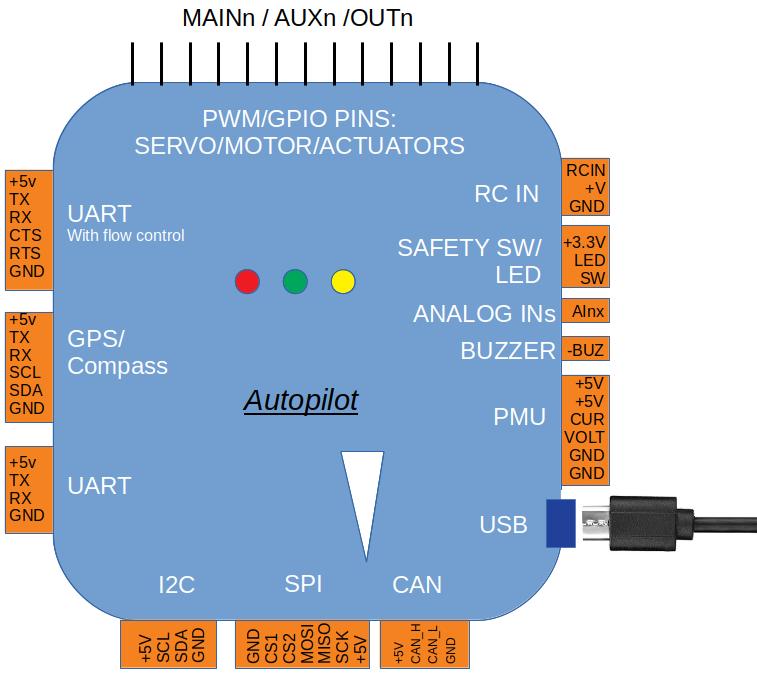
이 항목에서는 자동 조종 장치에 대한 기본/필수 주변 장치의 배선/연결을 다룹니다. 각 자동조종장치 포트/커넥터에 대한 자세한 설명은 자동조종장치 입력 및 출력을 참조하십시오.
GPS/나침반
GPS는 일반적으로 다른 위치 결정 센서 또는 시스템이 사용되는 경우를 제외하고 모든 차량에서 필수입니다 . Compass는 일반적으로 Copter, Rover 및 QuadPlane 유형의 비행기에도 필요하지만(나침반 대안에 대해서는 Compass-less Operation 참조 ) 일반 비행기에는 필요하지 않지만 권장됩니다.
메모
일부 Copter 및 Rover 모드는 GPS 및 나침반 없이 작동할 수 있습니다(비행 모드는 차량 설명서 참조).
시스템에서 여러 GPS 및/또는 나침반을 사용할 수 있습니다. 자세한 내용은 GPS 혼합(일명 이중 GPS) , 고급 나침반 설정 및 EKF3 선호도 및 차선 전환을 참조하십시오.
메모
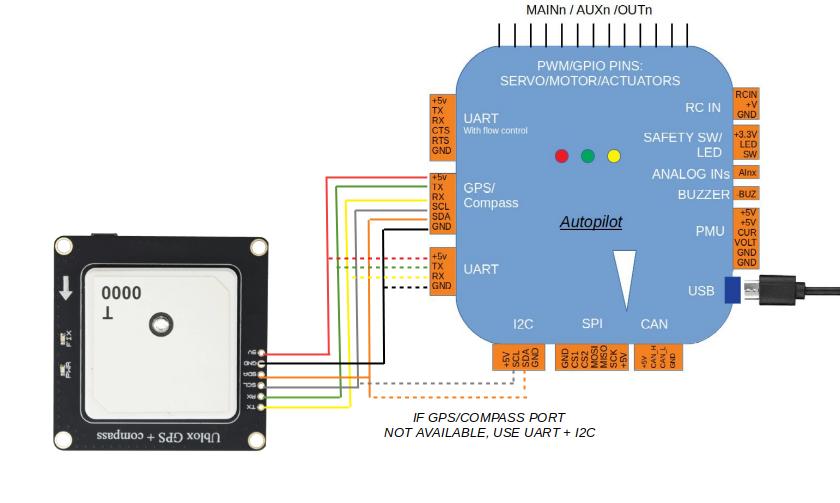
TX 및 RX는 자동 조종 장치에서 GPS 모듈로 교체됩니다.
메모
일반적으로 GPS는 ArduPilot에서 기본적으로 논리적 직렬 포트 3에 연결됩니다. 그러나 자동조종장치에서 ArduPilot의 직렬 포트 3에 할당된 물리적 UART는 자동조종장치 문서 에 설명되어 있습니다.
메모
SERIALx_PROTOCOLGPS 프로토콜에 대해 구성된 첫 번째 포트에서 찾을 수 없는 경우 부팅 중에 GPS 검색을 중지하기 때문에 매개변수가 "5"(GPS)로 설정된 첫 번째 SERIALx 포트에 GPS를 연결하는 것이 중요합니다 .
배선 예시로 3DR Ublox GPS + Compass Module 주제는 Pixhawk 자동 조종 장치에 연결하는 방법을 보여주고 추가 구성 및 장착 정보를 포함합니다.
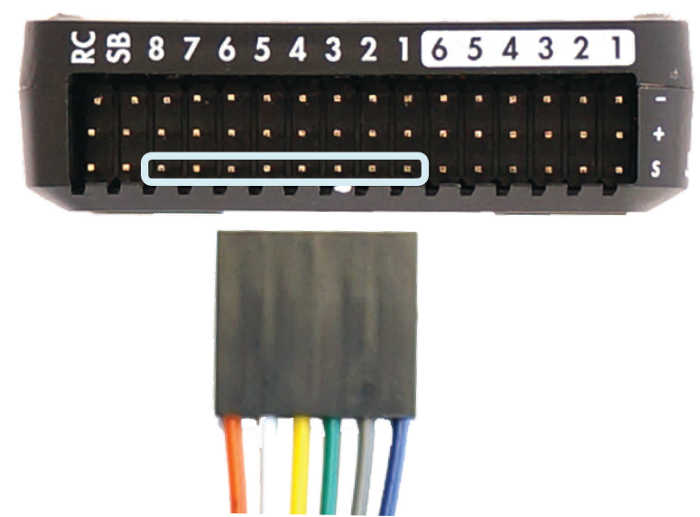
RC 입력
무선 제어 수신기는 일반적으로 파일럿 제어에 사용됩니다. 원격 측정을 사용하여 지상국을 통한 배타적 파일럿 제어가 가능하지만 권장되지 않습니다. (단, 조이스틱을 사용하여 지상국 소프트웨어를 통해 차량을 제어하는 것은 가능합니다. 조이스틱을 참조하십시오 .

ArduPilot은 다음 직렬 RC 수신기 프로토콜을 자동 감지합니다.
PPM 원격 제어(R/C) 수신기
SBus 수신기
FPort 수신기( FPort 수신기 참조 )
Crossfire(CRSF) 수신기( Team Black Sheep RC Systems 참조 , Telem을 위한 전체 UART 연결 필요)
스펙트럼 DSM 및 DSM2 수신기
스펙트럼 DSM-X 위성 수신기
IBUS 수신기
MULTIPLEX SRXL 버전 1 및 버전 2 수신기.
기존의 PWM(single-wire-per-channel) 수신기의 경우 PPM 인코더를 사용하여 수신기 출력을 PPM으로 변환할 수 있습니다.
팁
펌웨어의 ArduPilot 4.0 버전부터 지정된 RCin 또는 SBUS 입력 핀 대신 해당 포트를 23으로 설정하여 모든 자동 조종 장치 UART를 RC 수신기의 입력으로 사용할 수 있습니다. 그러나 일부 직렬 프로토콜에는 반전(SBUS,FPort)이 필요합니다 SERIALx_PROTOCOL. ) 및 UART는 SERIALx_OPTIONS매개변수를 사용하여 RX 입력을 반전할 수 있어야 합니다. 그렇지 않으면 외부 인버터가 필요합니다. 또한 이중화를 위해 두 번째 RC 수신기를 자동 조종 장치에 연결할 수 있습니다. 첫 번째 수신기(부팅 후 처음으로 유효한 것으로 감지됨)가 실패하면 두 번째 수신기가 사용됩니다. 보정된 RC 입력 범위 및 트림이 무엇이든 간에 활성화되면 두 번째에 사용됩니다. 이것이 제대로 작동하려면 두 수신기 모두 안전 장치에서 펄스를 보내지 않도록 설정해야 합니다. RC_OPTIONS 비트 10도 설정해야 합니다.
팁
호환되는 수신기 및 연결 방법에 대한 정보는 무선 제어 시스템 에서 찾을 수 있습니다 . 다중 RC 수신기 사용에 대해서는 다중 무선 제어 수신기 도 참조하십시오.

모터/서보 연결
모터 ESC 및/또는 PWM 서보는 자동 조종 장치의 PWM 출력에 연결됩니다.
MAIN/AUX 출력 또는 OUTPUT으로 레이블이 지정됩니다. 이 출력은 모터 ESC 또는 비행 표면의 서보 제어를 위한 PWM 또는 Dshot 신호를 제공합니다. 또한 릴레이, 낙하산, 그리퍼 등을 제어하기 위한 범용 I/O 핀으로도 사용할 수 있습니다.
MAIN/AUX 출력 레이블이 있는 컨트롤러는 일반적으로 IOMCU 보조 프로세서가 사용되고 있음을 나타냅니다. 이들은 모터/서보 출력으로 사용하기 위한 출력을 제공하고 주 자동 조종 장치가 실패할 경우 RC를 통해 중복 제어 수단을 제공합니다. MAIN 출력은 이 보조 프로세서에서 나오는 반면 AUX 지정 출력은 자동 조종 장치에서 직접 제어됩니다. 대부분의 보드 레벨 자동조종 장치는 IOMCU를 사용하지 않으며 OUTPUTx 또는 Mx로 표시된 출력만 있습니다.
AUX 출력(및 IOMCU가 없는 자동 조종 장치의 OUTPUT)을 PWM 또는 Dshot뿐만 아니라 GPIO로 사용할 수 있기 때문에 이러한 구분이 중요합니다. MAIN 출력은 PWM에만 사용할 수 있습니다.
메모
IOMCU를 사용하지 않는 몇몇 자동 조종 장치는 출력을 MAIN으로 표시하므로 실제로 GPIO 및/또는 Dshot ESC 제어 출력으로 사용할 수 있습니다. CUAV V5 Nano 및 Holybro Pixhawk 4 Mini가 그 예입니다.
종종 이러한 출력은 개별 출력 신호 외에도 서보 전원 및 접지를 공급하거나 분배하는 3핀 커넥터 스트립에 제공됩니다. 이 전원은 일반적으로 ESC 또는 BEC와 같은 외부에서 제공되지만 일부 자동 조종 장치는 내부 조정기에서 이 전원을 제공합니다.
Rover 연결 예

모터만 사용하는 헬리콥터의 예입니다. 이 경우 ESC 신호선만 연결됩니다.
Copter의 경우 ESC 및 모터 연결을 참조하십시오 .
개요에서 헬리콥터의 경우 모터 번호별로 PDB의 각 신호 와이어를 주 출력 신호(S) 핀에 연결합니다.
출력 1 = 모터 1 - - 출력 5 = 모터 5
출력 2 = 모터 2 - - 출력 6 = 모터 6
출력 3 = 모터 3 - - 출력 7 = 모터 7
출력 4 = 모터 4 - - 출력 8 = 모터 8
부저와 안전 스위치 연결
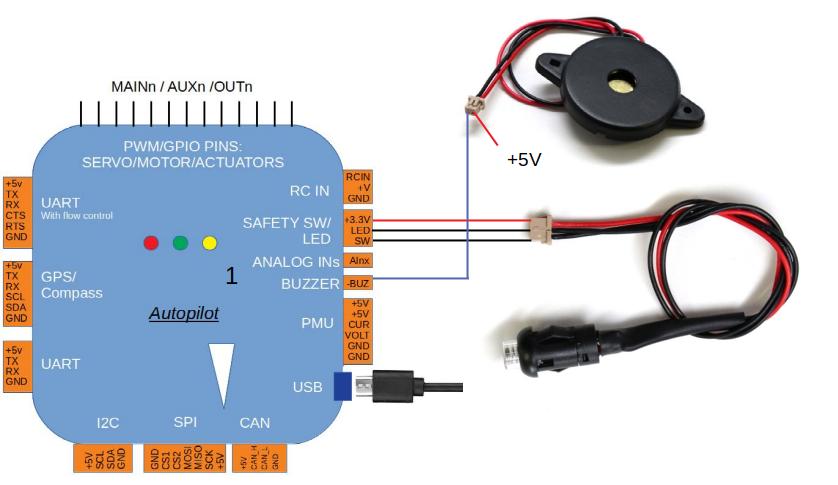
부저 및 안전 스위치 버튼은 선택 사항이지만 일부 구성에 유용합니다. 모든 자동 조종 장치가 이러한 연결을 제공하는 것은 아닙니다. BUZZER와 SWITCH는 그림과 같이 각각의 포트에 연결할 수 있습니다.
경고
비행 컨트롤러에서 최소 5cm 떨어진 곳에 비퍼를 장착하십시오. 그렇지 않으면 소음이 가속도계를 방해할 수 있습니다.
다른 주변 장치 연결
하드웨어에 따라 센서, 카메라, 그리퍼 등을 포함하여 연결된 다른 주변 장치가 얼마든지 있을 수 있습니다. 이들은 선택적 하드웨어 주제의 하위 페이지에서 찾을 수 있습니다 .
이러한 주변 장치를 자동 조종 장치에 연결하는 방법에 대한 정보는 해당 페이지에서 찾을 수 있습니다.
관련 정보
Last updated