오토파일럿 FC 장착
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo
이 문서에서는 자동 조종 장치를 표준 및 대체 방향으로 장착하는 방법을 설명합니다.
표준 방향
자동조종 장치 ( Pixhawk 등)는 케이스(기압계 위의 폼 포함) 안에 들어 있어야 하며 흰색 화살표가 차량 전면을 직접 향하도록 장착해야 합니다.
차량의 무게 중심에 가깝게 배치해야 합니다(수평 및 수직 모두). 일반적으로 이는 차량 중앙에서 몇 센티미터 이내에 모터와 같은 높이에 위치해야 함을 의미합니다. 정확히 중앙에 배치하는 것은 중요하지 않지만 가까울수록 좋습니다(컨트롤러가 무게 중심에서 멀어져 문제가 발생한 사례는 기록되지 않음). 자동 조종 장치를 차량 설정의 중앙에 배치할 수 없는 경우 IMU 위치 오프셋 매개변수가 성능을 약간 향상시킬 수 있습니다.
보드는 약 3/4인치 정사각형의 진동 흡수 폼 큐브 4개를 사용하여 프레임에 부착해야 합니다(3M 폼은 mRobotics 에서 구입할 수 있음 ).

팁
진동 감쇠 폼은 진동 제어를 위한 간단하고 효과적인 메커니즘입니다. 진동 측정이 충분하지 않다고 표시되면 진동 감쇠 에서 대체 메커니즘에 대해 설명합니다 .
대체 방향
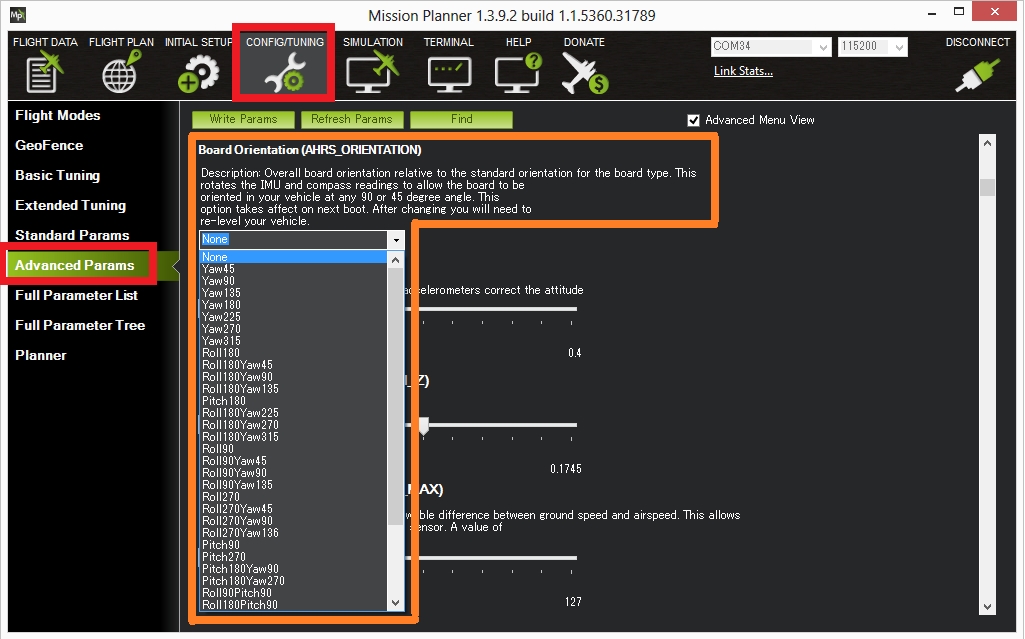
오토파일럿의 표준 방향이 불편할 경우 30가지가 넘는 다른 가능한 방향으로 장착할 수 있습니다. 가능한 방향의 전체 목록은 Mission Planner Config/Tuning | 고급 매개변수 화면에서 매개변수를 찾습니다 .Board Orientation (AHRS_ORIENTATION)
Roll 값의 경우 양수는 오른쪽으로 굴린다는 의미입니다(예: "Roll90"은 보드가 오른쪽으로 90도 굴러서 흰색 화살표가 여전히 앞을 가리키지만 보드가 오른쪽 가장자리에 서 있음을 의미함).
Pitch 값의 경우 양수는 피치 백을 나타냅니다(예: "Pitch90"은 보드의 노즈가 90도 위로 기울어져 화살표가 바로 위를 가리킴을 의미함)
Yaw 값의 경우 양수는 보드의 기수가 시계 방향으로 회전함을 나타냅니다(예: "Yaw90"은 보드가 회전하여 흰색 화살표가 오른쪽을 가리킴을 의미함).
경고
보드가 비표준 방향으로 장착된 경우(예: 화살표가 앞을 가리키지 않음) 가속도계 보정을 수행하기 전에 AHRS_ORIENTATION 이 올바르게 설정되었는지 확인하십시오.
Last updated