근접 센서
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo
Copter/Rover는 차량 앞에 나타날 수 있는 장애물 회피를 지원합니다. 이러한 기능을 활성화하는 첫 번째 단계는 근접 센서를 작동시키는 것입니다. ArduPilot은 최대 4개의 센서를 지원합니다.
360도 Lidar는 일반적으로 물체 회피에 근접 센서로 사용되지만 다중 거리계 센서 또는 스테레오 깊이 카메라도 근접 감지에 사용할 수 있습니다.
메모
사용자는 종종 RangeFinder를 근접 센서와 혼동합니다. 거리계는 일반적으로 매우 좁은 광선으로부터의 거리를 제공하는 1차원 센서입니다. 근접 센서는 일반적으로 360 Lidar 및 더 넓은 FOV를 가진 기타 센서에 사용되는 이름입니다. 두 종류의 센서에 사용되는 설정 및 매개변수는 다릅니다.
구성
PRXx_TYPE사용 중인 센서에 대해 매개변수를 올바르게 설정해야 합니다 . 360도 Lidar에는 시야에 장애물이 있을 수 있으므로 제외 구역이 제공됩니다. PRXx_IGN_ANGx제외 영역은 및 매개변수를 통해 설정되며 PRXx_IGN_WIDx프레임 장애물이 표시하고 무시되는 방향과 너비를 지정합니다. 최대 6개의 제외 섹터를 지정할 수 있습니다.
설정에 따른 구성 정보를 보려면 아래 링크를 따르십시오.
테스트
실시간 보기
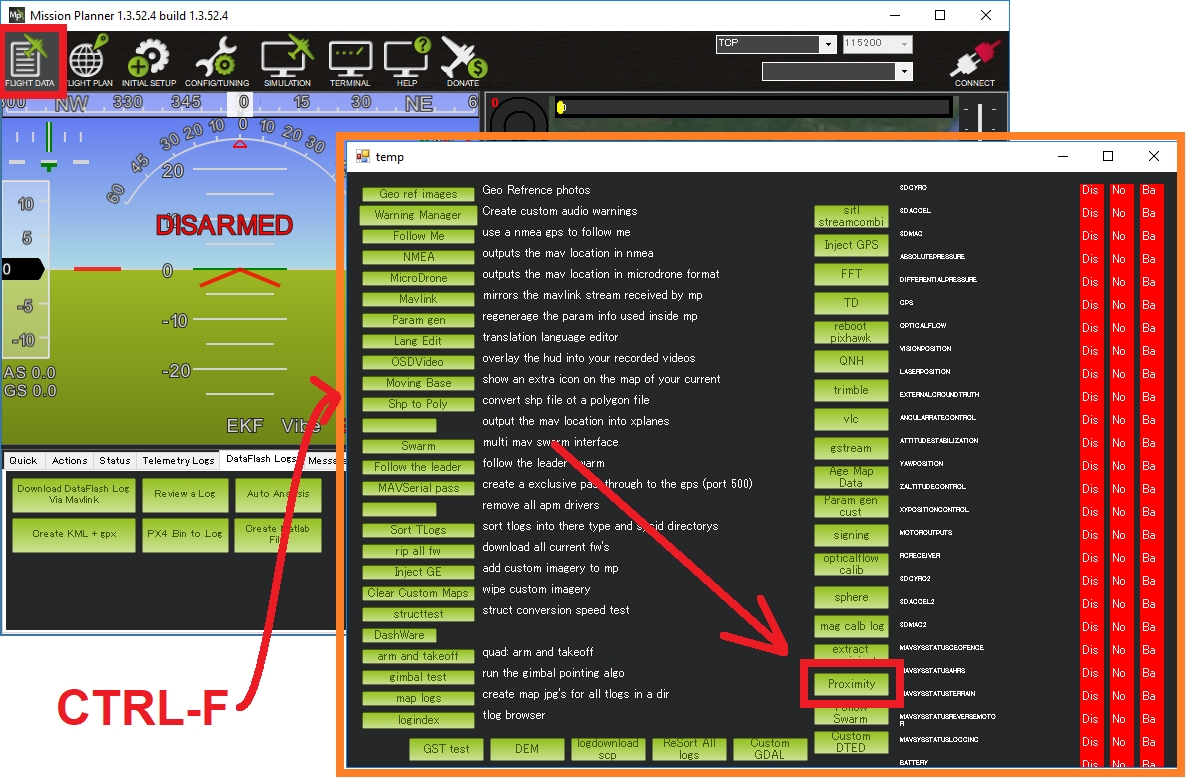
Mission Planner의 근접 뷰어에서 실시간 거리를 볼 수 있습니다.
이 창은 MP의 Flight Data 화면으로 이동하여 Ctrl-F를 누르고 Proximity 버튼을 눌러 열 수 있습니다.
DataFlash 로깅
DataFlash Log의 RFND 메시지에서 위쪽 및 아래쪽을 향한 거리 측정기 거리를 볼 수 있습니다.
차량 주변의 8개 사분면에서 가장 가까운 물체까지의 거리는 DataFlash 로그의 PRX 메시지에 기록됩니다. Copter 및 Rover 4.1에는 3D 장애물을 저장할 수 있는 기능이 있으므로 다양한 PRX 메시지 로그 인스턴스가 사용됩니다. 0번째 인스턴스는 -75도에서 -45도 피치 사이에서 감지된 장애물을 나타냅니다. 마찬가지로 PRX[1]은 -45도에서 -15도까지 저장하고 PRX[2]는 -15도에서 +15도까지 저장합니다.
추가 기능
필터
오토파일럿에는 다양한 센서를 부착할 수 있습니다. 그러나 센서의 품질과 사용 사례에 따라 노이즈가 있는 데이터를 제공할 수 있습니다. 이 소음은 자동 조종 장치에 "장애물"로 저장되며 차량이 갑자기 잘못된 물체를 피하기 시작할 수 있습니다. 이 문제를 해결하기 위해 Copter와 Rover 4.1에는 원시 센서 데이터에 저역 통과 필터가 내장되어 있습니다. 필터는 PRX_FILT 로 조정할 수 있습니다 (0으로 설정하면 기능이 비활성화됨). 기본적으로 필터링된 값만 기록됩니다. 그러나 PRX_LOG_RAW = 1로 설정하면 센서의 원시 값도 기록됩니다. 디버깅 목적으로 사용할 수 있습니다.
접지 감지
메모
이 기능은 먼저 구성된 유효한 아래쪽 방향 거리계가 필요하며 Copter에서만 작동합니다.
저고도 장애물 회피를 위해 이륙 및 착륙을 막 진행하는 동안 때때로 센서가 아래 지면을 장애물로 인식합니다. 차량이 이러한 장애물을 "피하려고" 시도하기 때문에 위험할 수 있습니다(회피 기능이 켜져 있는 경우). PRX_IGN_GND = 1 로 설정하면 지면 근처에 있는 모든 장애물을 감지하고 무시하려고 시도합니다.
경고
이 기능은 차량이 아밍한 경우에만 작동합니다. 또한 차량이 지면에 매우 가깝게 비행할 때 유효한 장애물을 무시할 수도 있습니다. 감지된 장애물은 Mission Planner Proximity Viewer 또는 데이터 플래시 로그에 표시되지 않습니다.
Last updated