BLHeli32 및 BLHeli_S ESC
BLHeli 펌웨어 및 구성 애플리케이션은 ESC 구성을 허용하고 추가 기능을 제공하도록 개발되었습니다. 이 펌웨어가 포함된 ESC를 사용하면 타이밍, 모터 방향, LED, 모터 드라이브 주파수 등을 구성할 수 있습니다. BLHeli를 사용하기 전에 DShot 설정 지침을 따르십시오 .
이 페이지에는 다음 기능에 대한 설정 지침이 포함되어 있습니다.
Pass-Through 지원을 통해 BLHeli 애플리케이션을 사용하여 자동 조종 장치에 연결된 상태를 유지하면서 ESC를 구성할 수 있습니다.
뒤집을 수 있는 DShot (일명 3D 모드)을 사용하면 모터가 어느 방향으로든 회전할 수 있습니다.
양방향 DShot을 사용하면 추가 원격 측정 연결 없이도 ESC가 RPM을 자동 조종 장치로 다시 보낼 수 있습니다.
ESC 원격 측정을 통해 ESC는 RPM, 전압 및 전류 정보를 다시 자동 조종 장치로 보내서 기록하거나 실시간으로 보거나 배터리 모니터를 제거할 수 있습니다 .
"BLHeli"는 ESC 펌웨어 및 함께 제공되는 구성 소프트웨어를 제공하는 여러(때로는 경쟁하는) 프로젝트를 다룹니다.
BLHeli는 더 이상 유지 관리되지 않으며 최신 ESC에서 사용할 수 없는 원래 오픈 소스 소프트웨어였습니다.
BLHeli32 는 비공개 소스이며 32비트 ARM MCU를 기반으로 합니다. 모든 최신 BLHeli ESC는 BLHeli32를 사용합니다.
BLHeli_S 는 오픈 소스이며 16비트입니다. 이것은 더 이상 적극적으로 유지되지 않지만 마지막으로 게시된 버전인 16.7은 공장에서 배송될 때 "BLHeli_S" ESC에 기본적으로 설치됩니다.
BLHeli_S JESC 는 유료 폐쇄 소스 소프트웨어이며 16비트로 로우엔드 하드웨어에서 실행할 수 있습니다.
BLHeli_S BlueJay 는 무료 오픈 소스 소프트웨어이며 16비트입니다.
Pass-Through 지원
Pass-Through 기능을 사용하면 BLHeli32 및 BLHeli_S ESC를 업그레이드하고 해당 BLHeliSuite32 또는 BLHeliSuite 애플리케이션(사용자 PC에서 실행)을 사용하여 구성할 수 있으며 ESC는 자동 조종 장치에 연결된 상태를 유지합니다. 이 기능을 사용하려면 다음 단계를 따르십시오.
PC에 BLHeliSuite32 (BLHeli32 ESC용), BLHeliSuite (BLHeli_S ESC용) 또는 JESC 구성기 (BLHeli_S JESC용)를 다운로드하고 설치합니다.
USB 케이블을 사용하여 PC를 자동 조종 장치에 연결한 다음 지상국(예: Mission Planner, QGC)에 연결합니다.
SERVO_BLH_AUTO를 1로 설정하면 멀티콥터 및 쿼드플레인 또는 스로틀(예: SERVOx_FUNCTION이 70("스로틀")으로 설정된 출력)에 대해 모터로 구성된 모든 출력(예: SERVOx_FUNCTION = "Motor1", "Motor2" 등) 에서 패스스루를 자동으로 활성화합니다 . 73("스로틀 왼쪽") 또는 74("스로틀 오른쪽")). 대부분의 멀티콥터, 쿼드플레인 및 로버의 경우 이것이 올바른 작업을 수행하지만 평면의 경우 SERVO_BLH_MASK를 설정하여 적절한 서보 출력에서 패스스루를 활성화합니다.
PC가 위에서 권장한 대로 USB 케이블을 사용하는 대신 원격 측정 라디오를 사용하여 자동 조종 장치에 연결된 경우 SERVO_BLH_PORT를 원격 측정 라디오에 연결된 자동 조종 장치 포트로 설정합니다. 이것은 자동 조종 장치에 대한 ESC 원격 측정 피드백에 사용되는 포트를 지정하지 않는다는 점에 유의하십시오!
안전 스위치를 사용하는 경우 눌러야 합니다(또는 BRD_SAFETY_DEFLT = 0으로 설정하여 비활성화). (
BRD_SAFETYENABLE이전 펌웨어 버전에서)지상국을 분리합니다(단, USB 케이블은 연결된 상태로 둡니다).
ESC 구성 소프트웨어를 시작하고 인터페이스 메뉴에서 "BLHeli32 Bootloader(Betaflight/Cleanflight)"를 선택하여 자동 조종 장치의 COM 포트에 연결합니다. "연결" 및 "설정 읽기"를 누릅니다. 연결된 모든 ESC를 업그레이드하고 구성할 수 있어야 합니다.

메모
ArduPilot 펌웨어는 최신 BLHeli32 펌웨어와 BLHeliSuite32 또는 BLHeli_S 펌웨어와 BLHeliSuite만 있는 통과 프로토콜을 지원합니다.
경고
패스스루가 작동하려면 DShot 프로토콜 중 하나를 사용하도록 자동 조종 장치를 구성해야 합니다. 결국 ESC가 지원하는 다른 프로토콜(예: PWM, OneShot125) 중 하나를 사용하려는 경우 여전히 Pass-Through를 사용하여 ESC를 구성할 수 있습니다(예: 모터 방향 변경, 최소/최대 값 설정 등). -DShot을 사용 하지 않도록 자동 조종 장치를 구성합니다 . 자동 조종 장치와 ESC가 재부팅되면 ESC는 ESC가 더 이상 DShot을 사용하지 않는다는 것을 자동 감지해야 합니다.
뒤집을 수 있는 DShot ESC¶
뒤집을 수 있는 DShot(일명 3D 모드)을 사용하면 모터가 어느 방향으로든 회전할 수 있습니다. 이는 로버, 보트 및 역 추력이 있는 비행기 에 중요합니다 .
현재 BLHeli32 및 BLHeli_S 가능 리버서블 DShot ESC만 지원됩니다. 하나를 사용하려면 이를 구동하는 출력을 SERVO_BLH_3DMASK 비트마스크 매개변수에서 적절한 비트로 지정해야 합니다. 이는 출력 1000-1500-2000 값을 ESC의 올바른 디지털 값으로 매핑하여 각각 FullReverse-Idle-FullForward 범위 작동을 제공합니다.
DShot 명령이 활성화된 경우 ArduPilot은 시작 시 SERVO_BLH_3DMASK에 따라 ESC를 가역 모드(3D 모드)로 자동 구성 합니다 . DShot 명령을 활성화하면 DShot 설정 지침 에서 설명한 DShot 마스크 매개변수에 의해 DShot으로 구성된 다른 ESC로 다른 DShot 명령을 보낼 수 있습니다 .
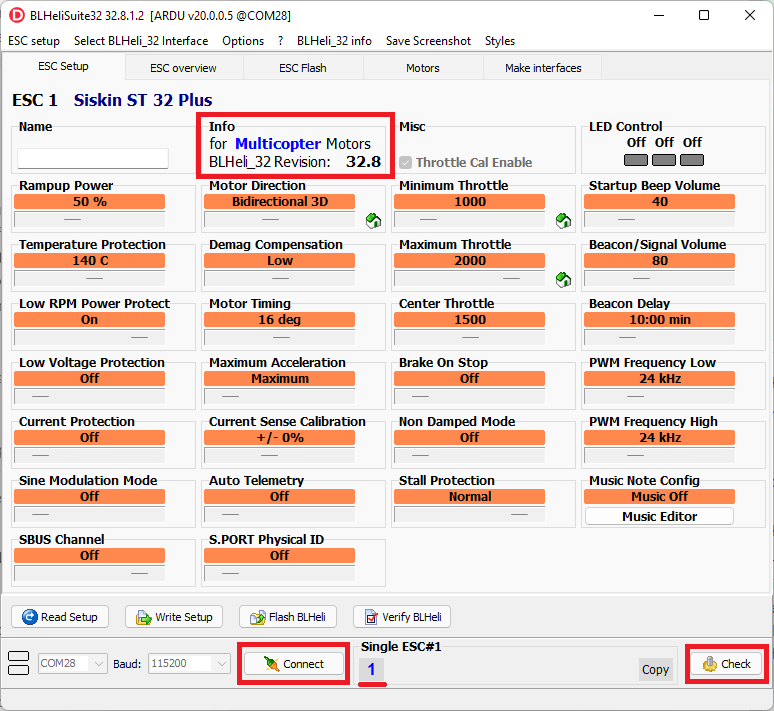
그렇지 않으면 아래와 같이 ESC의 "모터 방향"을 "양방향 3D"로 수동 구성해야 합니다.

메모
현재 ArduPilot은 Copter가 아닌 Plane 및 Rover용 리버서블 ESC 사용만 지원합니다.
ESC 텔레메트리
ESC에 이 기능이 있으면 이전에 추가 센서(예: 전원 모듈 및 RPM 센서)가 필요했던 성능 데이터를 모니터링하고 기록할 수 있습니다. 모든 ESC에서 제공하는 자세한 데이터를 통해 실시간 결정과 개별 ESC 또는 모터 성능 튜닝 및 고장 분석이 가능합니다. 주어진 ESC에는 원격 측정을 통해 전송된 특정 센서의 데이터가 있을 수도 있고 없을 수도 있습니다. 4 in 1 escs는 전압 및 전류 센서를 제공하지만 원격 측정을 통해 데이터를 전송하지 않고 자동 조종 장치에 직접 연결하는 것이 일반적입니다. 자세한 내용은 ESC 데이터 시트 및 연결 정보를 확인하십시오.
메모
ArduPilot은 현재 비 DShot 프로토콜의 신호 라인을 통해 스로틀 유휴 메시지를 통해 원격 측정 데이터에 대한 ESC 폴링을 지원하지 않습니다.
ESC 원격 측정 와이어 연결¶
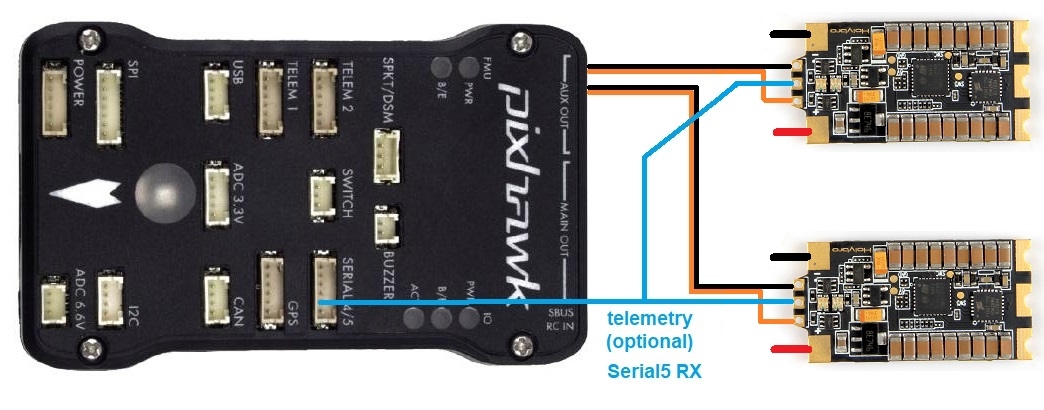
모든 ESC 원격 측정 와이어를 자동 조종 장치의 단일 직렬 포트 RX 핀에 연결합니다(위 다이어그램에서는 Serial5를 예로 사용). ESC 원격 측정을 위한 핀 또는 와이어는 대부분의 BLHeli32 ESC에 미리 납땜되어 있습니다. 와이어가 미리 납땜되지 않은 경우 직접 납땜해야 합니다. CubePilot 직렬 포트 핀아웃은 여기에서 찾을 수 있습니다 .
자동 조종 장치의 직렬 포트에 대한 BLHeli32 원격 측정 피드백을 활성화하려면 다음 매개변수를 설정합니다.
SERIALx_PROTOCOL 16(= ESC 원격 측정) 여기서 "x"는 ESC 원격 측정 와이어에 연결된 자동 조종 장치 직렬 포트 번호입니다. 자동조종 장치를 위한 직렬 포트 번호 지정과 UART 물리적 포트 간의 매핑은 여기 에 링크된 설명 페이지에 문서화되어야 합니다 .
SERVO_BLH_TRATE의 기본값은 10이며 일반적으로 변경할 필요가 없습니다. 이를 통해 ESC에서 10Hz 업데이트 속도로 원격 측정이 가능합니다. 고조파 노치 기능을 사용하는 경우이 값을 100으로 높일 수 있습니다.
SERVO_BLH_POLES의 기본값은 대부분의 브러시리스 모터에 적용되며 일반적으로 변경할 필요가 없는 14입니다. ESC의 e-field RPM에서 실제 모터 샤프트 RPM을 계산하기 위해 14개 이외의 폴 카운트가 있는 모터를 사용하는 경우 필요에 따라 조정하십시오.
ESC 원격 측정 로깅 및 보고
자동조종장치는 한 번에 하나의 ESC에서 상태 정보를 요청하며 그 사이를 순환합니다. 이 정보는 온보드 로그의 ESCn 메시지에 기록되며 모든 ArduPilot 호환 로그 뷰어 에서 볼 수 있습니다 .
RPM
전압
현재의
온도
총 전류
RCOU 메시지는 또한 1000(정지됨을 의미)에서 2000(전체 출력을 의미)까지의 숫자로 표현되는 ESC로 전송된 요청된 출력 레벨을 보유하는 온보드 로그에 기록됩니다.
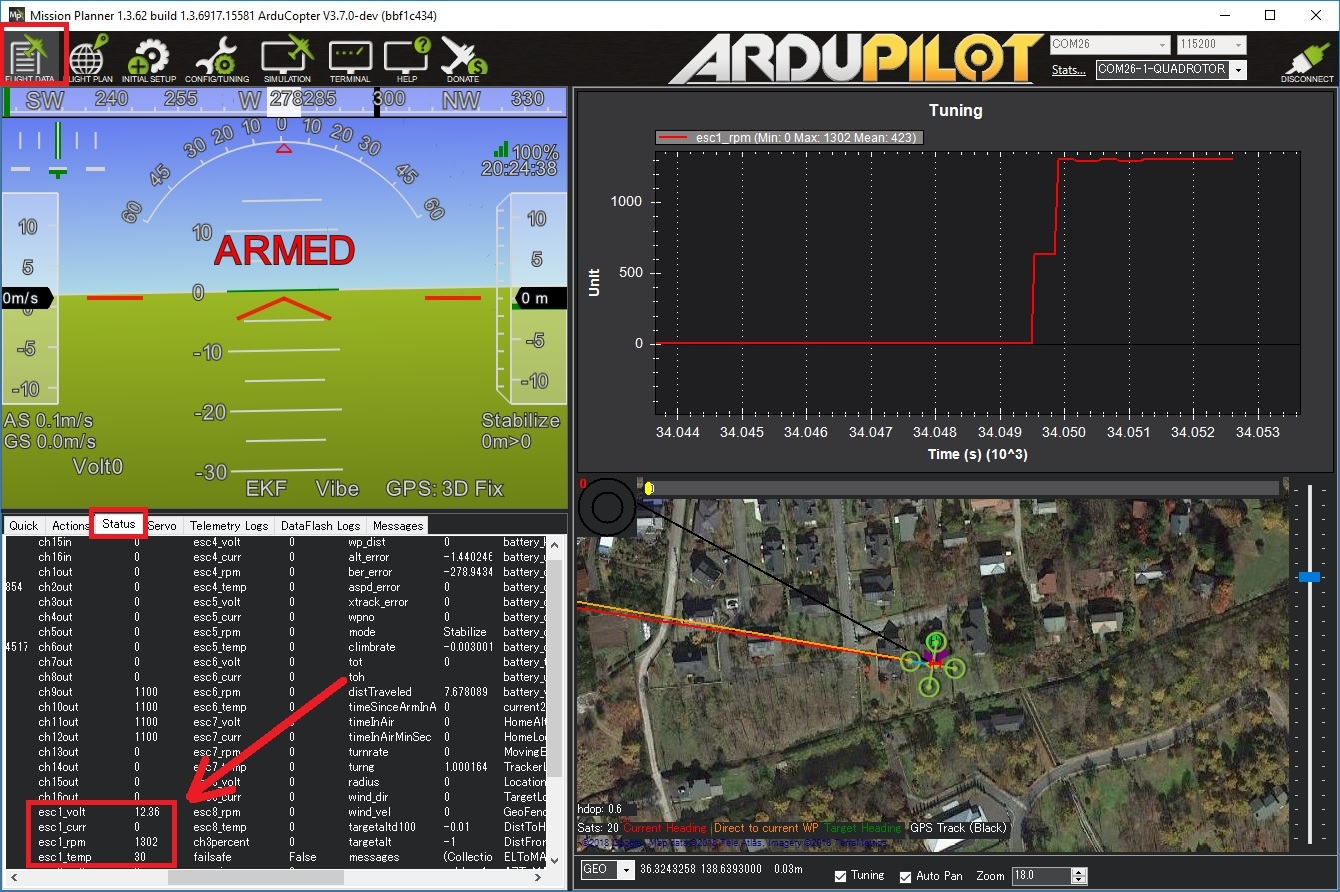
이 데이터는 지상국을 사용하여 실시간으로 볼 수도 있습니다. Mission Planner를 사용하는 경우 Flight Data 화면의 상태 탭으로 이동하여 esc1_rpm을 찾습니다.
메모
BLHeli32 원격 측정 데이터를 GCS로 보내려면 MAVLink2를 사용하는 원격 측정 연결이 필요합니다. ArduPilot은 기본적으로 USB 포트에서 MAVLink2를 사용하지만 다른 포트를 사용하는 경우 SERIALx_PROTOCOL 매개변수를 2로 설정해야 할 수 있습니다(여기서 "x"는 원격 측정 연결에 사용되는 직렬 포트 번호입니다).
또한 자동 조종 장치에 있는 경우 통합 온보드 OSD 에 일부 원격 측정 값을 표시할 수 있습니다.
배터리 모니터로 사용
배터리 모니터 인스턴스를 BLHeli32 ESC 유형(예: BATT2_MONITOR = 9)으로 설정하면 구성된 자동 조종 장치 직렬 포트에 원격 측정 배선이 연결된 모든 연결된 BLHeli32 ESC가 단일 소스로 집계됩니다. 보고된 전압은 평균화되고 전류는 합산되며 소비된 전류는 누적됩니다.
양방향 DShot
최신 버전의 BLHeli32(32.7 이상) 및 BLHeli_S(16.73 이상)는 DShot 신호 라인을 통해 모터 RPM 값 반환을 지원합니다. 양방향 DShot을 지원하려면 하나 이상의 DMA 채널을 독점적으로 사용해야 하므로 ArduPilot의 모든 버전에서 지원하지는 않습니다. 양방향 DShot을 기본적으로 지원하는 버전은 아래에 나열되어 있습니다. 다른 자동 조종 장치의 경우 "-bdshot"으로 끝나는 ArduPilot 펌웨어 버전을 로드하십시오.
비스트F7, 비스트F7v2, 비스트H7, 비스트H7v2
플라이우F745, 플라이우F745나노
카쿠테F4미니, 카쿠테F7미니, 카쿠테H7미니
가장 낮은 4개의 DShot 가능 서보 출력만 사용할 수 있습니다. IOMCU(예: Pixhawk, CubeOrange)가 있는 자동 조종 장치의 경우 이는 AUX1에서 AUX4까지 사용할 수 있음을 의미합니다. 별도의 IOMCU 보조 프로세서가 없는 Pixracer 및 기타 자동 조종 장치의 경우 이는 출력 1~4를 사용할 수 있음을 의미합니다.
설정
먼저 적절한 버전의 BLHeli32 또는 BLHeli_S가 ESC에 설치되어 있는지 확인하십시오. 대부분의 ESC에는 이러한 버전이 미리 설치되어 있지 않습니다. BLHeli32의 공식 32.7 버전은 양방향 DShot을 지원합니다. BLHeli_S의 공식 버전은 양방향 DShot을 지원하지 않으므로 BLHeli_S JESC 에서 버전을 구입하거나 BLHeli_S BlueJay를 사용해야 합니다 . 잘못된 펌웨어 버전으로 양방향 DShot을 활성화하려고 하면 예측할 수 없는 모터 작동이 발생할 수 있습니다.
BLHeli32 및 BLHeli_S 양방향 DShot을 활성화하려면 다음 매개변수를 설정합니다.
SERVO_BLH_BDMASK : BLHeli32 또는 BLHeli_S 양방향 DShot 지원을 활성화하는 데 사용되는 비트맵입니다. IOMCU가 없는 자동조종 장치에서는 일반적으로 4개의 활성 채널을 나타내기 위해 15로 설정됩니다. IOMCU가 있는 자동조종장치에서 이것은 4개의 활성 AUX 채널을 나타내기 위해 3840으로 설정할 수 있습니다(양방향 DShot은 AUX 출력에서만 작동함).
SERVO_BLH_POLES의 기본값은 대부분의 브러시리스 모터에 적용되며 일반적으로 변경할 필요가 없는 14입니다. ESC의 전자장 RPM에서 실제 모터 샤프트 RPM을 계산하기 위해 14극 이외의 극수를 가진 모터를 사용하는 경우 필요에 따라 조정하십시오(소형 모터에는 12극이 있을 수 있음).
Last updated