펌웨어 설치 (ArduPilot)
이 지침은 ArduPilot 펌웨어가 이미 설치된 자동 조종 장치 하드웨어에 최신 펌웨어를 다운로드하는 방법을 보여줍니다. 이 프로세스는 Mission Planner 지상 관제소를 사용합니다. 기존 ArduPilot 펌웨어 없이 보드에 펌웨어 로드를 참조하십시오 .
자동 조종 장치를 컴퓨터에 연결
컴퓨터에 지상국을 설치 했으면 아래와 같이 USB 케이블을 사용하여 자동 조종 장치를 연결합니다. 컴퓨터의 직접 USB 포트를 사용하십시오(USB 허브 아님).

Pixhawk USB 연결
Windows는 올바른 드라이버 소프트웨어를 자동으로 감지하고 설치해야 합니다.
COM 포트 선택
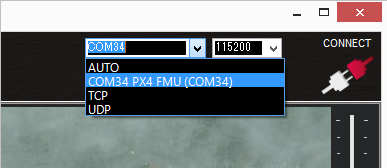
Mission Planner를 GCS로 사용하는 경우 연결 버튼 근처 창의 오른쪽 상단 모서리에 있는 COM 포트 드롭다운을 선택합니다 . AUTO 또는 보드의 특정 포트를 선택하십시오 . 그림과 같이 전송 속도를 115200 으로 설정합니다 . 아직 연결을 누르지 마십시오 .
펌웨어 설치
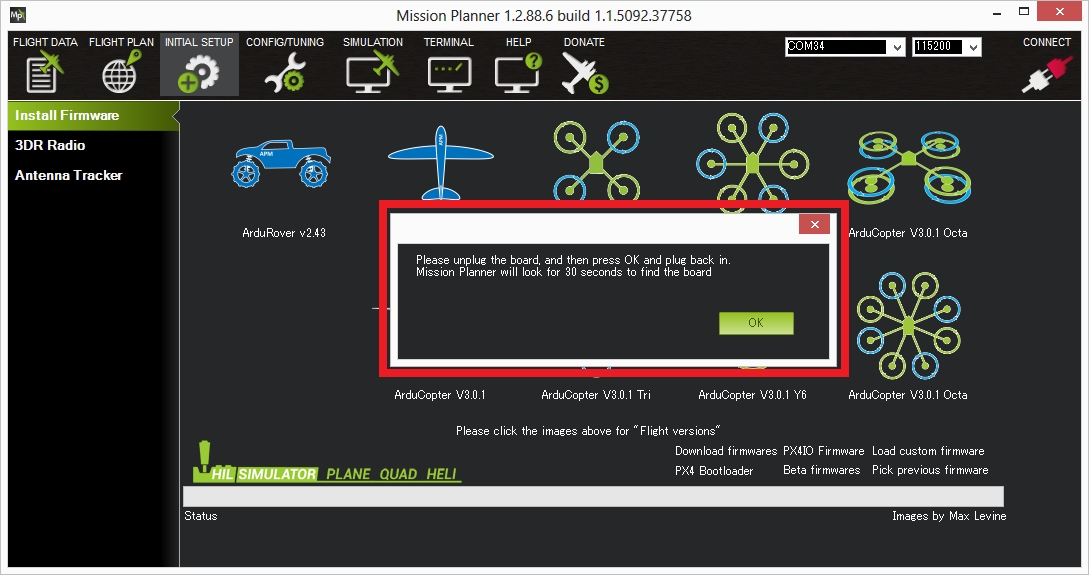
Mission Planner의 SETUP에서 | Install Firmware 화면에서 차량 또는 프레임 유형(예: Quad, Hexa)과 일치하는 적절한 아이콘을 선택합니다. "Are you sure?"라고 물으면 예 라고 대답합니다 .

Mission Planner는 사용 중인 보드를 감지하려고 시도합니다. 보드를 분리하고 확인을 누른 다음 보드 유형을 감지하기 위해 다시 연결하라는 메시지가 표시될 수 있습니다.
종종 선택할 수 있는 보드용 펌웨어 변형의 드롭다운 상자가 표시됩니다(예: 가능한 경우 양방향 DShot 변형). Pixhawk 보드 ID를 공유하는 보드의 경우 목록은 아래와 같이 광범위합니다.

보드에 적합한 펌웨어를 선택하십시오. "Pixhawk"라고 표시된 보드의 경우 일반적으로 Pixhawk1 펌웨어가 최선의 선택입니다.
경고
Pixhawk 2.4.x로 레이블이 지정된 일부 보드에는 예비 암 검사 또는 보조 IMU가 없을 수 있는 센서 대체가 있을 수 있습니다. MS5611을 사용해야 하는 MS5607 기압계의 일부 보드에서 알려진 센서 대체에 대한 해결 방법은 BARO_OPTIONS 매개변수를 참조하십시오. IMU를 대체할 수도 있습니다. 가능한 경우 ArduPilot 파트너의 자동 조종 장치를 소싱하십시오.
모든 것이 순조롭게 진행되면 오른쪽 하단에 "삭제...", "프로그램...", "확인.." 및 "업로드 완료"라는 단어가 포함된 상태가 표시됩니다. 펌웨어가 보드에 성공적으로 업로드되었습니다.
프로그래밍 또는 전원 켜기 후에 부트로더가 종료하고 메인 코드로 들어가는 데 보통 몇 초가 걸립니다. 이것이 발생할 때까지 CONNECT를 누르십시오.
메모
펌웨어를 최신 버전으로 업데이트해도 펌웨어가 다른 차량용인 경우가 아니면 기존 매개변수가 변경되지 않습니다. 이 경우 매개변수는 해당 차량의 기본값으로 재설정됩니다. 그러나 업데이트하는 동안 문제가 발생할 경우를 대비하여 펌웨어 업데이트 전에 Mission Planner의 CONFIG/전체 매개변수 트리 탭 에 있는 "파일에 저장" 버튼을 사용하여 매개변수를 파일에 저장하는 것이 좋습니다 . 일부 매개변수의 의미가 다를 수 있으므로 새 버전으로 업그레이드한 후 모든 매개변수를 적용하지 마십시오.
베타 및 개발자 버전 사용
베타
Stable릴리스 전에 Beta버전이 릴리스됩니다. 새로운 기능을 시도하거나 개발자가 새 코드를 테스트하는 데 도움을 주려는 경우 사용할 수 있습니다. 이들은 "베타" 버전이므로 여전히 버그가 있을 수 있습니다. 안정적인 릴리스 펌웨어에서도 가능합니다. 그러나 베타 릴리스는 개발 팀에서 테스트했으며 이미 비행 테스트를 거쳤습니다. 이 릴리스를 통해 더 많은 사용자 기반이 Stable. 숙련된 ArduPilot 사용자는 이 펌웨어를 테스트하고 피드백을 제공하는 것이 좋습니다.
Mission Planner에는 펌웨어 설치 페이지에 이 릴리스를 업로드할 수 있는 옵션이 있지만 이후 Stable릴리스는 이미 사용 가능할 수 있습니다. 먼저 일반 차량 업로드 옵션을 확인하십시오.
최신 개발자 버전
이는 ArduPilot 코드 개발 분기의 현재 상태를 반영합니다. 개발 팀에서 검토하고 모든 자동화 테스트 스위트를 통과했으며 대부분의 경우 테스트 비행을 했습니다. 이 코드는 매일 작성되며 숙련된 사용자가 테스트할 수 있습니다. 이것은 "알파" 릴리스에 해당하며 버그가 있을 수 있지만 "충돌 유발"은 거의 없습니다. 기능을 변경하거나 소개하는 추가 사항이 추가된 직후 Wiki의 예정된 기능 섹션이 추가 또는 변경 사항에 대한 정보로 업데이트됩니다.
이 코드는 특정 보드에 대한 펌웨어 다운로드 페이지 에서 수동으로 다운로드 latest한 다음 해당 펌웨어 설치 페이지 에서 Mission Planner의 "사용자 지정 펌웨어 로드" 옵션을 사용하여 업로드해야 합니다.
커스텀 펌웨어 빌드 서버
ArduPilot은 현재 사용자가 선택 가능한 기능으로 자동 조종 장치용 펌웨어 빌드를 생성할 수 있는 맞춤형 펌웨어 빌드 서버를 실험적으로 테스트하고 있습니다. 이제 모든 1MB 플래시 크기 보드에는 코드를 맞출 수 있는 기능 제한이 있으므로 사용자가 포함하거나 포함하지 않을 기능을 선택할 수 있는 경로를 제공하여 1MB 자동 조종 장치 사용자에게 약간의 유연성을 제공합니다.
서버는 여기에 있습니다
펌웨어 설치 페이지 에서 Mission Planner의 "사용자 정의 펌웨어 로드" 옵션을 사용하여 다운로드하고 자동 조종 장치에 플래시할 수 있는 사용자 정의 빌드를 생성할 수 있습니다.
펌웨어 제한 사항
특정 자동 조종 장치에 대한 현재 "최신" 펌웨어에 포함되지 않은 기능 목록은 이 페이지를 참조하십시오 .
현재 1MB 자동 조종 장치에 포함되지 않은 모든 기능 옵션은 기본적으로 사용자 지정 펌웨어 빌드 서버의 옵션 목록에 있습니다. 또한 애플리케이션에 필요하지 않을 수 있는 많은 기능이 1MB 자동 조종 장치에 여전히 포함되어 있습니다. 따라서 불필요한 기능 중 일부를 제거하면서 현재 제외된 기능 중 일부를 포함하는 빌드를 생성할 수 있습니다. 기능 옵션 목록은 지속적으로 확장되어 다른 큰 기능을 삭제하고 더 제한된 기능을 사용자 지정 빌드에 추가할 수 있습니다. 예를 들어 QuadPlane 기능을 포함하지 않으면 이를 필요로 하지 않는 Plane의 공간이 절약됩니다. 드라이버 및 주변 장치 지원을 개별적으로 선택할 수 있으므로 코드에 사용된 항목만 허용되므로 다른 기능이 맞춤형 펌웨어에 포함될 수 있습니다.
현재 빌드는 일일 마스터 브랜치에서만 가져온 것입니다("최신"). 앞으로는 안정 및 베타 분기를 선택할 수 있습니다.
Last updated