Mission Planner를 AutoPilot에 연결
이 문서 에서는 원격 측정을 수신하고 차량을 제어하기 위해 Mission Planner를 자동 조종 장치에 연결하는 방법을 설명합니다 .
메모
기존 ArduPilot 펌웨어 설치 또는 기존 ArduPilot 펌웨어가 없는 보드의 경우 펌웨어를 로드 하기 위한 별도의 연결 지침이 있습니다 .
연결 설정
연결을 설정하려면 먼저 사용할 통신 방법/채널을 선택한 다음 물리적 하드웨어 및 Windows 장치 드라이버를 설정해야 합니다. USB 케이블, Telemetry Radios , Bluetooth , IP 연결 등을 사용하여 PC와 자동 조종 장치를 연결할 수 있습니다.
메모
연결 하드웨어용 드라이버는 연결의 COM 포트와 기본 데이터 속도를 Mission Planner 에서 사용할 수 있도록 Windows에 있어야 합니다 .


Mission Planner 에서 연결 및 데이터 속도는 화면 오른쪽 상단에 있는 드롭다운 상자를 사용하여 설정합니다.
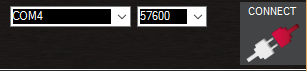
USB 또는 Telemetry Radio를 연결하면 Windows가 자동 조종 장치에 COM 포트 번호를 자동으로 할당하고 드롭다운 메뉴에 표시됩니다(실제 번호는 중요하지 않음). 연결에 적합한 데이터 속도도 설정됩니다(일반적으로 USB 연결 데이터 속도는 115200이고 무선 연결 속도는 57600임).
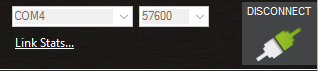
원하는 포트와 데이터 속도를 선택한 다음 CONNECT 버튼을 눌러 자동 조종 장치에 연결하십시오. 연결 후 Mission Planner는 자동조종장치에서 매개변수를 다운로드하고 버튼은 다음과 같이 DISCONNECT 로 변경됩니다.
팁
"포트 선택" 드롭다운에는 네트워크를 통해 자동 조종 장치에 연결하는 데 사용할 수 있는 TCP 또는 UDP 포트 옵션도 포함되어 있습니다.
포트 선택 상자 아래의 "통계..." 핫링크를 클릭하면 서명 보안이 활성화되었는지, 링크 통계 등과 같은 연결에 대한 정보가 제공됩니다. 때때로 이 창이 현재 화면 아래에 나타나서 가져와야 합니다. 볼 수 있는 앞쪽으로.

여러 차량에 연결
CONNECT 버튼을 마우스 오른쪽 버튼으로 클릭하고 드롭다운 목록에서 연결 옵션을 선택하여 추가 연결을 만들 수 있습니다 .
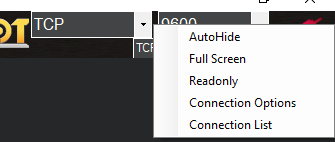
미리 작성된 연결 목록이 있는 파일은 연결 목록 드롭다운 옵션을 사용하여 로드할 수 있습니다. 다음은 파일의 예시 형식입니다.
문제 해결
Mission Planner가 연결할 수 없는 경우:
선택한 방법(USB의 경우 115200 또는 라디오/원격 측정의 경우 57600)에 올바른 전송 속도가 사용되는지 확인합니다.
USB를 통해 연결하는 경우 연결을 시도하기 전에 전원을 켠 후 몇 초가 경과했는지 확인하십시오. 부트로더 초기화 시간 동안 연결을 시도하면 Windows에서 잘못된 USB 정보를 얻을 수 있습니다. 이 후 연결을 시도하려면 USB 연결을 분리했다가 다시 연결해야 할 수 있습니다. 그런 다음 부트로더가 기본 코드를 입력할 때까지 기다린 다음(몇 초) 연결을 시도합니다. 경우에 따라 부트로더 초기화 기간 동안 연결을 시도하면 MP를 다시 시작해야 합니다.
Windows에서 COM 포트를 사용하는 경우 연결의 COM 포트가 Windows 장치 관리자의 직렬 포트 목록에 있는지 확인하십시오.
자동 조종 장치에 F7 또는 H7 프로세서가 있고 CAN 포트가 있는 경우 아래 섹션 복합 연결 문제 해결을 참조하십시오.
USB 포트를 사용하는 경우 다른 물리적 USB 포트를 사용해 보십시오.
UDP 또는 TCP 연결을 사용하는 경우 방화벽이 IP 트래픽을 차단하지 않는지 확인하십시오.
또한 자동 조종 장치 보드에 적절한 ArduPilot 펌웨어가 설치되어 있고 올바르게 부팅되었는지 확인해야 합니다(Pixhawk에는 자동 조종 장치의 상태를 알려줄 수 있는 유용한 LED 와 소리가 있습니다 ).
원격 링크(USB가 아님)를 사용하고 Mission Planner가 연결되지만 매개변수를 다운로드하지 않거나 모드 변경과 같은 명령을 받을 수 없는 경우 자동 조종 장치에 서명이 켜져 있을 수 있습니다. MAVLink2 서명을 참조하십시오 .
복합 연결 문제 해결
F7 또는 H7 프로세서가 있고 CAN 인터페이스가 있는 자동 조종 장치는 두 개의 USB 인터페이스를 제공하는 펌웨어를 사용합니다. 하나는 일반적인 MAVLink 연결용이고 다른 하나는 구성 및 펌웨어 업데이트를 위한 CAN 인터페이스에 대한 SLCAN 직렬 연결용입니다. 이를 복합 USB 장치라고 합니다.
기본적으로 MAVLink USB 인터페이스는 SERIAL0이고 SLCAN USB 인터페이스는 보드가 제공하는 가장 높은 SERIALx 포트입니다. 현재 Mission Planner와 함께 설치된 Windows 드라이버는 둘 중 하나를 사용하도록 선택할 수 있으며 둘 다 기본적으로 MAVLINK 프로토콜용 ArduPilot 펌웨어에 설정되어 있으므로 COM 포트로 선택하는 것이 무엇이든 잘 작동합니다.
그러나 사용자가 Mission Planner 드롭다운 상자에서 명백한 COM 포트에 연결되지 않는다는 것을 알게 되는 상황이 있습니다. 이것은 사용자가 실수로 Windows 드라이버가 MAVLink COM으로 사용하는 SERIALx 포트의 프로토콜을 변경했을 때 발생합니다. MAVLink가 아닌 다른 것으로 포팅합니다. 이는 사용자가 프로토콜이 변경된 다른 자동 조종 장치와 함께 사용되는 차량 구성에서 기존 매개변수 파일을 가져오는 경우 쉽게 발생할 수 있습니다. 예를 들어, 사용자는 F7/H7 CAN이 지원되지 않는 자동 조종 장치가 있는 비행기를 가지고 있고 이를 업그레이드한 다음 새 자동 조종 장치로 비행기를 설정하는 동안 기존 매개 변수 파일을 로드합니다. 매개변수 파일이 로드되고 자동 조종 장치가 재부팅되는 즉시 통신이 끊어지고 다시 설정할 수 없습니다.
발생한 것은 Windows가 사용하고 있던 SERIALx 포트의 프로토콜이 변경되었다는 것입니다. 거의 항상 이것은 가장 높은 번호의 SERIALx 포트입니다. 이는 일반적으로 CAN이 지원되지 않는 자동 조종 장치에서 -1로 설정되고 Windows COM 포트 드라이버가 SERIAL0 대신 이 인터페이스를 COM 포트로 선택했기 때문입니다.
복구 절차는 다음과 같습니다.
Windows 장치 관리자로 이동하여 포트 목록에서 자동 조종 장치가 사용 중인 COM 포트를 찾으십시오. 처음에 Mission Planner에 연결하는 데 사용한 COM 포트 번호가 있습니다. 마우스 오른쪽 버튼을 클릭하면 "드라이버 소프트웨어 업데이트"가 옵션 중 하나로 표시됩니다. 클릭하세요.

"내 컴퓨터 찾아보기..." 옵션을 클릭한 다음 "목록에서 선택..." 옵션을 클릭하면 다음 화면이 표시됩니다.

"Composite USB" 옵션이 나타날 때까지 상단 목록을 아래로 스크롤하고 클릭합니다.
이제 자동 조종 장치를 PC에 다시 연결하면 두 개의 COM 포트가 표시됩니다. 하나는 연결되고(MAVLink 프로토콜을 사용하는 나머지 하나) 다른 하나는 연결되지 않습니다. 하나에 연결되지 않으면 다른 하나를 시도하십시오. 그러나 PC에서 자동 조종 장치를 분리하지 마십시오. 그렇지 않으면 복합 드라이버가 언로드되어 다시 시작해야 합니다.
이제 Mission Planner에 연결되었으므로 Serialx 포트 프로토콜의 프로토콜을 2(MAVLink2)로 다시 변경하십시오. 이제 자동조종 장치를 연결 해제했다가 다시 연결할 수 있으며 COM 포트가 하나만 나타나므로 지금부터 연결할 수 있습니다. SLCAN 인터페이스를 사용하지 않는 한 지금부터 이 프로토콜을 변경하지 마십시오. 사용중인 Mission Planner SERIALx 포트가 더 이상 일반 SERIAL0이 아닌 가장 높은 포트이기 때문에 다소 생소할 수 있지만 오토파일럿의 구성 및 작동에는 아무런 영향을 미치지 않습니다.
Last updated