EKF 안전 장치
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
EKF 안전 장치는 EKF(위치 및 자세 추정 시스템)의 상태를 모니터링하여 차량의 위치 추정 문제(종종 GPS 결함 또는 나침반 오류로 인해 발생)를 포착하고 "비행"을 방지합니다.
언제 트리거됩니까?
EKF 안전 장치는 나침반, 위치 또는 속도에 대한 EKF "분산(variances)" 중 두 가지가 1초 동안 FS_EKF_THRESH 매개변수 값 보다 높을 때 트리거됩니다 .
이러한 "분산"은 EKF 자체에서 비롯되며 추정치에 대한 EKF의 신뢰도를 나타내는 숫자입니다. 값은 0과 1 사이이며 0은 추정치를 매우 신뢰할 수 있고 1.0은 매우 신뢰할 수 없음을 의미합니다.
EKF는 여러 센서의 결과를 비교하여 이러한 "분산"을 계산합니다. 예를 들어, GPS 위치가 갑자기 점프하지만 가속도계가 급격한 가속을 나타내지 않으면 위치에 대한 EKF 분산이 증가합니다(즉, 덜 신뢰할 수 있음).
편차는 지상국에서 실시간으로 볼 수 있습니다. Mission Planner를 사용하는 경우 HUD에서 "EKF" 레이블을 클릭합니다.

안전 장치가 작동하면 어떻게 됩니까?
원격 측정이 연결된 경우 지상국의 HUD에 "EKF variance"가 표시됩니다.
GPS가 필요하지 않은 수동 비행 모드(예: Stabilize, Acro, AltHold)에서는 더 이상 아무 일도 일어나지 않지만 조종사는 오류가 해결될 때까지 자율 비행 모드(Loiter, PosHold, RTL, Guided, Auto)로 전환할 수 없습니다.
GPS가 필요한 자율 모드(예: Loiter, PosHold, RTL, Guided, Auto 등)에서는 FS_EKF_ACTION이 동작 을 제어합니다. 기본적으로 이것은 차량이 Land 모드 로 전환됨을 의미하는 "1"입니다 . 이것은 조종사가 롤과 피치 각도를 제어할 수 있지만 차량이 LAND_SPEED로 하강한다는 것을 의미하는 "조종사 제어" 랜드 입니다 . 그것은 착륙하고 마침내 모터를 해제합니다
EKF 비상 안전 오류가 dataflash 로그에 기록됩니다.
EKF 페일세이프가 발생한 후 조종사는 AltHold 와 같은 수동 비행 모드에서 비행 모드 스위치를 사용하여 다시 조종하여 차량을 집으로 가져올 수 있습니다.
안전 장치의 감도 조정
FS_EKF_THRESH 매개변수를 조정하여 안전 장치의 민감도를 제어할 수 있습니다 .
EKF 안전 장치를 비활성화하려면 FS_EKF_THRESH = 0으로 설정하십시오 .
EKF 안전 장치의 가능성을 줄이려면 FS_EKF_THRESH를 0.8과 1.0 사이의 값으로 늘립니다 . 이 매개변수 값을 높일 때의 단점은 나쁜 나침반이나 GPS 결함으로 인해 비행하는 동안 차량이 자동으로 LAND 모드로 전환되기 전에 차량이 더 멀리 날아갈 수 있다는 것입니다.
EKF 안전 장치가 빠르게 트리거될 가능성을 높이려면 FS_EKF_THRESH를 0.6만큼 낮은 값으로 줄입니다 . 이 값을 낮추면 EKF 안전 장치가 공격적인 기동 중에 LAND를 트리거할 수 있다는 단점이 있습니다.
Dataflash 로그 예시
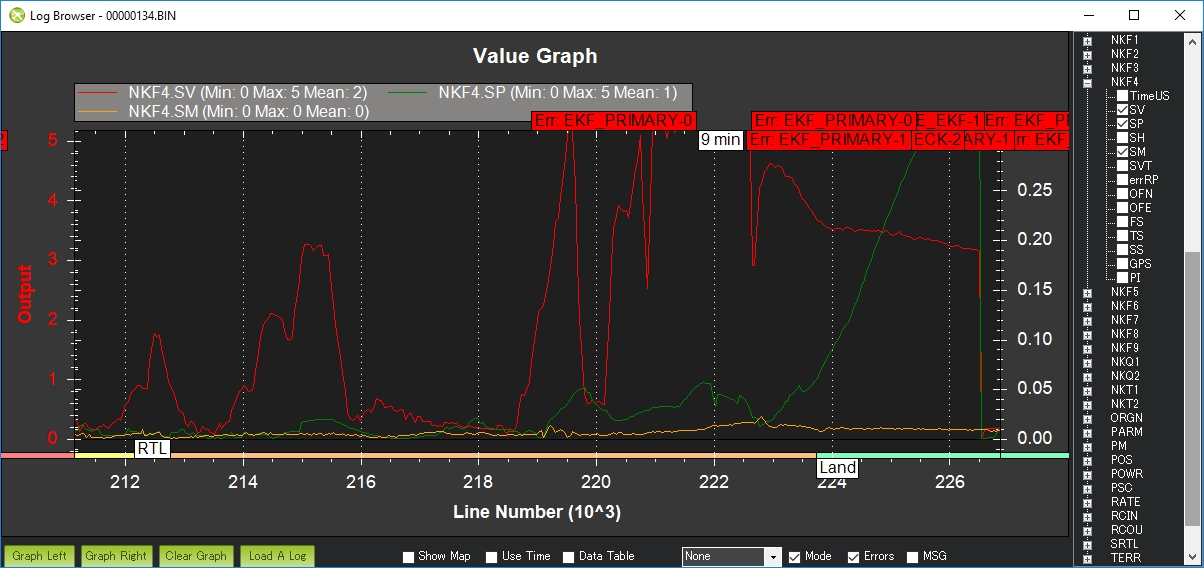
EKF의 혁신은 데이터 플래시 로그의 NKF4.SP(위치 혁신), NKF4.SV(속도 혁신) 및 NKF4.SM(나침반 혁신) 값을 그래프로 표시하여 볼 수 있습니다.
아래 그래프는 실제 EKF 안전 장치 이벤트 동안 위치(녹색), 속도(빨간색) 및 나침반(노란색)에 대한 EKF의 혁신을 보여줍니다. 이 사고 동안 외부 간섭(근처의 고성능 라디오 타워에서 발생한 것으로 추정됨)으로 인해 GPS가 부정확한 위치와 속도를 보고했습니다. 차량은 속도와 위치 혁신이 모두 FS_EKF_THRESH 값 0.8을 넘어선 직후 Land 모드로 전환됩니다.
Last updated