무선 안전 장치
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
Copter는 파일럿의 RC 송신기와 자동조종 장치의 수신기 사이의 연결이 끊어진 경우 구성 가능한 몇 가지 안전 장치 옵션을 지원합니다. 이 페이지에서는 이 안전 장치의 설정 및 테스트에 대해 설명합니다. 일부 수신기가 스로틀 채널을 사용하여 접촉이 끊어졌음을 알리는 방식 때문에 "라디오 안전 장치"를 이전에는 "스로틀 안전 장치"라고 했습니다.
경고
Copter 3.6 이하 단일 헬리콥터, 이중 헬리콥터 및 쿼드 헬리콥터 프레임의 경우 H_RSC 모드 또는 Copter 4.0 이상에서 H_RSC_Mode RC Passthrough 방식은 송신기 신호가 손실될 때 마지막 값을 유지하기 위해 RC 수신기 채널 8이 필요합니다. 수신기가 신호를 보내지 않거나 RC 채널 8 값을 유지하지 않으면 모터가 꺼지고 헬리콥터가 추락합니다.
메모
Copter는 배터리 , 지상국 및 EKF/DCM 안전 장치를 포함한 다른 안전 장치도 지원합니다 . 자세한 내용은 안전 장치를 참조하십시오 .
안전 장치가 작동할 때
활성화되고 올바르게 설정된 경우 RC_FS_TIMEOUT 초 이상 다음 조건이 발생하면 무선 안전 장치가 트리거됩니다 .
조종사가 비행중 RC 송신기를 껏을때.
차량이 RC 범위를 벗어나 이동하고 신호가 손실될때.
조종사는 송신기에서 FS_THR_VALUE 아래로 스로틀 채널을 강제할때.
수신기의 전원이 꺼짐(가능성이 낮음).
수신기를 자동 조종 장치에 연결하는 전선이 끊어짐(가능성이 낮음).
안전장치 트리거
무선 안전 장치가 트리거되면 아무것도 하지 않거나 즉시 착륙하거나 RTL 또는 SmartRTL을 수행하도록 매개변수를 통해 콥터를 구성할 수 있습니다. 자동 모드 임무에서 안전 장치를 우회하거나 이미 착륙 단계에 있는 경우 계속 착륙하도록 구성할 수도 있습니다.
콥터가 무장해제되면 안전 장치가 작동하지 않습니다.
콥터가 무장했지만 착륙한 경우 콥터는 즉시 무장을 해제합니다.
콥터가 Stabilize 또는 Acro 모드에서 무장하고 스로틀 입력이 최소이면 콥터가 즉시 무장을 해제합니다.
그렇지 않으면 콥터는 아래에 설명된 매개변수에 구성된 대로 조치를 취합니다.
페일세이프가 해제되면(즉, 송신기와 수신기가 다시 접촉하면) 콥터는 페일세이프 모드를 유지합니다. 안전 장치가 작동되기 전에 활성화된 비행 모드로 자동으로 돌아 가지 않습니다 . 즉, 예를 들어 안전 장치가 작동했을 때 차량이 Loiter에 있었고 비행 모드가 자동으로 RTL로 변경된 경우 송신기와 수신기가 다시 접촉한 후에도 차량은 RTL에 남아 있게 됩니다. 조종사가 Loiter에서 다시 제어권을 얻으려면 비행 모드 스위치를 다른 위치로 변경한 다음 Loiter로 다시 전환해야 합니다.
수신기 구성
기본적으로 새로 구입한 대부분의 수신기는 송신기와의 접촉이 끊어지면 단순히 펄스를 출력하지 않습니다. 그러나 일부 로우엔드 수신기는 모든 채널을 마지막으로 알려진 위치에 간단히 고정하도록 설정됩니다. 오토파일럿은 파일럿이 차량 통제력을 상실했다는 사실을 알 방법이 없기 때문에 좋지 않습니다. 대신 리시버는 자동 조종 장치에 연락이 끊어졌다는 신호를 보내도록 설정해야 하며 이를 수행할 수 있는 두 가지 방법이 있습니다(방법은 리시버에 따라 다름). 송신기/수신기의 각 브랜드는 조금씩 다르므로 사용 가능한 방법과 설정 방법을 확인하려면 송신기의 사용 설명서를 참조하십시오.
로우 스로틀 방식을 위한 수신기 구성
"Low-Throttle" 방법은 스로틀 채널(일반적으로 채널 3)을 정상 범위의 바닥 아래 값(일반적으로 1000us 미만)으로 끌어옵니다. 이 방법은 Futaba 시스템 및 많은 이전 시스템에서 사용됩니다. 아래는 "로우 스로틀" 방법을 사용하는 R617FS 또는 TFR4-B 수신기가 있는 Futaba T7C 송신기의 설정 방법입니다.
많은 수신기는 단순히 수신기의 버튼을 누르거나 송신기에서 직접 페일세이프 위치를 설정할 수 있습니다. 이 경우 송신기는 일시적으로 일반 저속 공회전 위치 아래에서 스로틀 신호를 출력하도록 조정됩니다(저속 공회전이 1000us인 경우 990uS가 전송됨) 이를 수신기의 안전 장치 값으로 설정한 다음 낮은 스틱을 다시 정상으로 조정합니다. 유휴 위치. 이 아래 스로틀 유휴 값은 아래 설명된 대로 FS_THR_VALUE 에 대해 설정됩니다 .
무신호 방식의 수신기 구성
"신호 없음" 방법 - 수신기가 자동 조종 장치에 신호를 보내는 것을 중지합니다. 이것은 선호되는 방법이며 대부분의 최신 FrSky 수신기가 작동하는 방식입니다. 아래는 "신호 없음" 방법을 사용하는 FrSky D4R-II 수신기가 있는 FlySky 9 채널 송신기의 설정 방법입니다.
매개변수 구성
FS_THR_ENABLE 매개변수는 Mission Planner 전체 매개변수 목록 또는 전체 매개변수 트리에서 설정 하거나 초기 설정 >> 필수 하드웨어 >> 안전 장치 메뉴의 Mission Planner 안전 장치 옵션 드롭다운을 사용 하여 설정할 수도 있습니다 .
Disabled (값 0)는 무선 안전 장치를 완전히 비활성화합니다.
Enabled Always RTL (값 1)은 콥터를 RTL 모드로 전환합니다. GPS 위치를 사용할 수 없는 경우 콥터는 대신 Land Mode로 변경됩니다.
Enabled Continue with Mission in Auto Mode (이 값은 4.0 이상에서는 FS_OPTIONS 매개변수 교체 기능에 영향을 미치지 않습니다. 아래 참조) (값 2)는 자동 모드 임무에서 안전 장치를 무시합니다. 그렇지 않으면 Enabled Always RTL 과 동일하게 작동합니다 . 이 옵션은 ArduCopter 4.0에 더 이상 존재하지 않습니다. 대신 이 함수에 대한 FS_OPTIONS 매개변수를 참조하십시오. Copter 4.0 이상 버전에서 이 값을 설정하면 자동으로 변환되어 (값 1)로 설정되고 FS_OPTIONS는 " 무선 안전 장치에서 자동 모드인 경우 계속"에 대한 비트 마스크에 비트(0)를 포함하도록 수정됩니다.
Enabled Always Land (값 3)는 콥터를 Land 모드로 전환합니다.
활성화된 SmartRTL 또는 RTL (값 4)은 콥터를 SmartRTL 모드로 전환합니다. SmartRTL을 사용할 수 없으면 콥터가 대신 RTL 모드로 전환됩니다. GPS 위치를 사용할 수 없는 경우 콥터는 대신 Land Mode로 변경됩니다.
활성화된 SmartRTL 또는 Land (값 5)는 콥터를 SmartRTL 모드로 전환합니다. SmartRTL을 사용할 수 없으면 콥터가 Land Mode로 대신 전환됩니다.
유효하지 않은 값(실수로 매개변수 값으로 99를 입력하는 등)은 Enabled Always LAND 와 동일하게 작동합니다.
FS_THR_VALUE 매개변수는 Mission Planner 전체 매개 변수 목록 또는 전체 매개변수 트리에서 설정 하거나 초기 설정 >> 필수 하드웨어 >> 안전 장치 메뉴에서 Mission Planner FS PWM 값 을 사용하여 설정할 수도 있습니다 . - 스로틀 스틱이 완전히 내려지고 송신기가 꺼져 있을 때 채널 3의 PWM 값보다 최소 10 PWM 더 높음 - 스로틀 스틱이 완전히 내려지고 송신기가 켜져 있을 때 채널 3의 PWM 값보다 최소 10 PWM 더 낮음 - 위 910 PWM
FS_OPTIONS 매개변수(Copter 4.0 이상)는 라디오, GCS 및 배터리 안전 장치의 표준 동작을 수정하는 하나 이상의 옵션을 선택하기 위한 비트마스크 매개변수입니다 . Mission Planner 전체 매개변수 목록 또는 전체 매개변수 트리에서 편리한 확인란 팝업 창을 통해 이 매개변수(및 기타 비트마스크)를 쉽게 설정할 수 있습니다. 도움말 > 베타 업데이트 확인으로 이동하여 인터넷에 연결된 상태에서 먼저 최신 매개변수 정의를 가져오십시오. FS_OPTIONS 비트는 다음 과 같습니다.
비트 0 설정: 라디오 페일세이프 의 자동 모드인 경우 계속
비트 1 설정: 지상 제어 스테이션 안전 장치 의 자동 모드인 경우 계속
비트 2 설정: 안내 모드인 경우 계속 라디오 페일세이프
비트 3 세트: 안전 장치에 착륙하면 계속 진행
비트 4 설정: 지상 제어 스테이션 안전 장치 에서 파일럿 제어를 계속합니다.
위의 항목이 설정되지 않은 경우 구성된 대로 FS_THR_ENABLE 옵션을 실행합니다.
메모
비트마스크 비트 0, 2, 3만이 무선 안전 장치 중에 취한 조치에 영향을 미칩니다. 이 매개변수는 배터리 및 GCS 안전 장치와 함께 작동하므로 이 매개변수를 설정할 때 모든 옵션을 고려해야 합니다.
아래는 Mission Planner Initial Setup >> Mandatory Hardware >> Failsafe 메뉴의 스크린샷입니다.

테스트
USB 케이블 또는 원격 측정 링크를 통해 미션 플래너에 연결된 자동 조종 장치로 다음 테스트를 수행하여 안전 장치를 확인할 수 있습니다. LiPo 배터리를 연결하지 않고도 이러한 테스트를 완료할 수 있지만 배터리를 연결하는 경우 먼저 프로펠러를 제거해야 합니다.
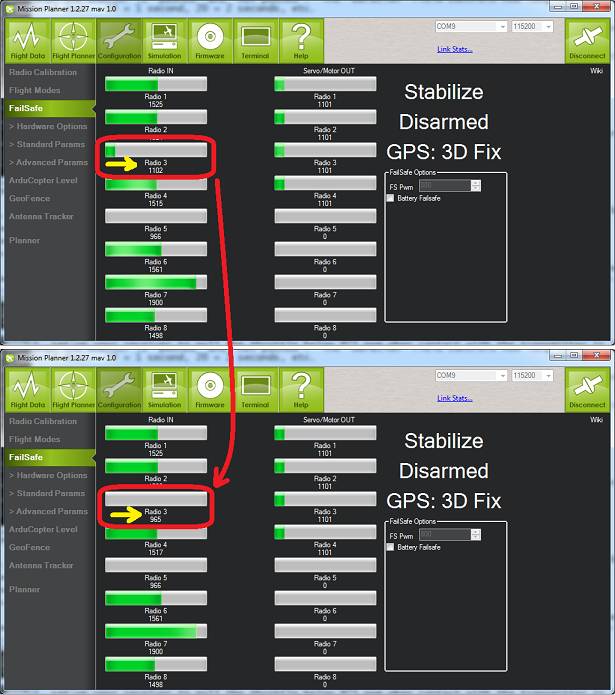
테스트 #1: "Low-Throttle" 방법을 사용하는 경우 무선 연결이 끊어지면 스로틀 채널이 떨어지는지 확인합니다.
RC 송신기가 켜져 있고 스로틀이 끝까지 연결되어 있고 비행 모드가 Stabilize로 설정되어 있는지 확인하십시오.
스로틀(채널 3) PWM 값은 대략 아래의 첫 번째 그림과 같아야 합니다. 그 값은 더 높거나 낮을 수 있지만 확실히 FS PWM 필드에 있는 값보다 적어도 10 이상 높아야 합니다.
송신기를 끄면 스로틀 PWM 값이 아래의 FS PWM 필드 값(아래 두 번째 그림 참조)보다 10 이상 낮아야 합니다.
테스트 #2: 스로틀이 0인 상태에서 STABILIZE 또는 ACRO인 경우 모터가 해제되도록 합니다.
안정화 모드로 전환하고 모터를 무장하되 스로틀을 0으로 유지하십시오. 송신기를 끄십시오. 모터는 즉시 해제되어야 합니다(빨간색 LED가 깜박이기 시작하고 DISARMED가 Mission Planner의 비행 데이터 화면에 표시됨).
테스트 #3: 스로틀이 0 이상일 때 비행 모드가 RTL 또는 LAND로 변경되는지 확인
안정화 모드로 전환하고 모터를 무장하고 스로틀을 중간 지점으로 올립니다. 송신기를 끄십시오. 비행 모드는 GPS 잠금이 있는 경우 RTL로, GPS 잠금이 없는 경우 LAND로 전환되어야 합니다(비행 모드 및 GPS 잠금 상태는 Mission Planner의 비행 데이터 화면에서 볼 수 있음).
테스트 #4: 안전 장치가 해제된 후 제어권 다시 획득
테스트 #3부터 계속해서 송신기를 다시 켜십시오.
비행 모드가 여전히 RTL 또는 LAND에 있고 준비되어 있는 동안 비행 모드 스위치를 다른 위치로 변경한 다음 다시 안정화 모드로 돌아갑니다. Failsafe 페이지에 표시된 비행 모드가 적절하게 업데이트되고 있는지 확인하십시오.
테스트 #5(옵션): 수신기에서 전원 제거
안정화 모드로 전환하고 모터를 무장하고 스로틀을 0 이상으로 유지하십시오.
수신기를 자동조종 장치에 연결하는 전선을 조심스럽게 분리합니다.
비행 모드는 테스트 #3에서 설명한 대로 RTL 또는 LAND로 전환해야 합니다.
경고
수신기의 전원을 다시 연결하기 전에 전원이 꺼지도록 자동 조종 장치의 플러그를 뽑으십시오.
수신기를 사용하여 비행 모드 설정( 사용하지 마십시오! )
위에서 설명한 대로 수신기와 자동 조종 장치를 설정하는 대신(예: "로우 스로틀" 및 "신호 없음" 방법) 수신기는 설정된 비행 모드 슬롯 에 채널 5( 비행 모드 채널)를 설정하도록 설정할 수 있습니다. RTL로. 예를 들어 수신기는 ch5의 pwm 값을 "비행 모드 5"인 1700us로 이동하도록 설정할 수 있으며, 미션 플래너의 초기 설정 >> 필수 하드웨어 >> 비행 모드 화면에서 RTL로 설정할 수 있습니다.
이것이 작동하는 것처럼 보이지만 충돌로 이어질 수 있는 상황이 발생할 수 있으므로 권장하지 않습니다. 자동 조종 장치는 RC 안전 장치가 발생했는지 알 수 있는 방법이 없기 때문에 모드 변경으로 배터리 부족 또는 GCS 안전 장치와 같은 다른 안전 장치를 무시하는 것과 같은 원하지 않는 동작이 발생할 수 있습니다.
Last updated