배터리 안전 장치
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
배터리 안전 장치는 차량 배터리 전압이 10초 동안 지정된 전압 아래로 떨어지거나 예상 잔여 용량이 구성 가능한 임계값 아래로 떨어지면 차량을 RTL , SmartRTL 또는 Land 모드로 자동 전환하도록 구성할 수 있습니다.
메모
이 안전 장치를 사용하려면 차량에 작동하는 전원 모듈이 있어야 합니다 .
ArduPilot 펌웨어 버전 4.0 이상은 최대 9개의 배터리/전원 모니터를 지원합니다. 아래 설명은 옵션 배터리에도 적용됩니다. 각각은 안전 장치를 트리거할 수 있으며 각각 다른 작업 및 설정 값을 가질 수 있습니다. 또한 배터리 그룹을 단일 단위로 취급할 수 있습니다( BATTx_MONITOR= 10 참조).
안전 장치가 작동할 때
활성화되고 올바르게 설정되면 기본 배터리의 배터리 안전 장치가 트리거됩니다.
10초 이상 동안 BATT_LOW_VOLT 매개변수(또는 이전 버전의 FS_BATT_VOLTAGE) 에 유지된 전압 아래로 전압이 떨어집니다 . 기본 전압은 10.5볼트입니다. 0으로 설정하면 전압 기반 트리거가 비활성화됩니다.
남은 용량이 BATT_LOW_MAH 매개변수(또는 이전 버전의 FS_BATT_MAH) 아래로 떨어집니다. 배터리 전체 용량의 20%가 좋은 선택입니다(예: 5000mAh 배터리의 경우 "1000"). 0으로 설정하면 용량 기반 트리거가 비활성화됩니다(즉, 전압만 사용됨).
안전 장치가 작동될 때
부저가 시끄러운 배터리 부족 경보를 울립니다.
LED가 노란색으로 깜박입니다.
"배터리 부족!" 지상국 HUD에 표시됩니다(원격 측정이 연결된 경우).
그러면 다음 중 하나가 발생합니다.
차량이 이미 무장해제되었거나 RTL 또는 Land를 실행 중인 경우 아무것도 없습니다.
차량이 Stabilize 또는 Acro 모드이고 스로틀이 0에 있거나 차량이 착륙한 경우 모터를 해제합니다.
BATT_FS_LOW_ACT 매개변수 에 있는 사용자 구성 가능 조치
0 : 없음 - 조치를 취하지 않습니다.
1 : Land - 차량이 Land 모드 로 전환됩니다.
2 : RTL - 가능한 경우 차량이 RTL (Return-to-Launch) 모드로 전환되지만 가능하지 않은 경우(좋은 위치 추정이 없기 때문에) 차량이 착륙 합니다 ( 권장 ).
3 : SmartRTL 또는 RTL - 가능한 경우 차량이 SmartRTL 모드로 전환되고, 가능하지 않은 경우(SmartRTL의 위치 버퍼가 가득 차 있기 때문에) 차량이 RTL 로 전환됩니다 . RTL도 가능하지 않은 경우(좋은 위치 추정이 없기 때문에) 차량은 Land 로 전환됩니다.
4 : SmartRTL 또는 Land - 가능한 경우 차량이 SmartRTL 모드로 전환되고, 가능하지 않은 경우(SmartRTL의 위치 버퍼가 가득 차 있기 때문에) 차량이 Land 로 전환됩니다.
5 : 종료 - 차량이 모터를 해제합니다. 이것은 대부분의 경우에 사용해서는 안 되는 위험한 옵션입니다.
모든 안전 장치와 마찬가지로 사용자는 비행 모드 스위치를 다른 모드로 변경하여 차량을 다시 제어할 수 있습니다. 2중 안전 장치가 설정되지 않으면 배터리 안전 장치가 다시 작동하지 않습니다(아래 참조).
FS_OPTIONS 매개변수(Copter 4.0 이상)는 라디오, GCS 및 배터리 안전 장치의 표준 동작을 수정하는 하나 이상의 옵션을 선택하기 위한 비트마스크 매개변수입니다 . Mission Planner 전체 매개변수 목록 또는 전체 매개변수 트리에서 편리한 확인란 팝업 창을 사용하면 이 매개변수(및 기타 비트마스크) 매개변수를 쉽게 설정할 수 있습니다. 도움말 > 베타 업데이트 확인으로 이동하여 인터넷에 연결된 상태에서 먼저 최신 매개변수 정의를 가져오십시오. FS_OPTIONS 비트는 다음 과 같습니다.
비트 0 설정: 라디오 페일세이프 의 자동 모드인 경우 계속
비트 1 설정: 지상 제어 스테이션 안전 장치 의 자동 모드인 경우 계속
비트 2 설정: 안내 모드인 경우 계속 라디오 페일세이프
비트 3 세트: 안전 장치에 착륙하면 계속 진행
비트 4 설정: 지상 제어 스테이션 안전 장치 에서 파일럿 제어를 계속합니다.
위의 항목이 설정되지 않은 경우 구성된 대로 BATT_FS_LOW_ACT 또는 BATT_FS_CRT_ACT 옵션을 실행합니다.
메모
비트마스크 비트 3만이 배터리 비상 안전 중에 수행되는 작업에 영향을 미칩니다. 이 매개변수는 GCS 및 무선 안전 장치와 함께 작동하므로 이 매개변수를 설정할 때 모든 옵션을 고려해야 합니다.
비상 안전 조치가 "없음"(예: BATT_FS_LOW_ACT = 0)으로 설정되어 있어도 버저가 울리고 LED가 노란색으로 깜박입니다. 배터리 안전 장치를 완전히 비활성화하려면 BATT_LOW_VOLT 및 BATT_LOW_MAH를 0으로 설정합니다.
배터리 안전 장치가 작동되면 자동 조종 장치가 재부팅될 때까지 재설정할 수 없습니다.
Mission Planner를 사용하여 설정
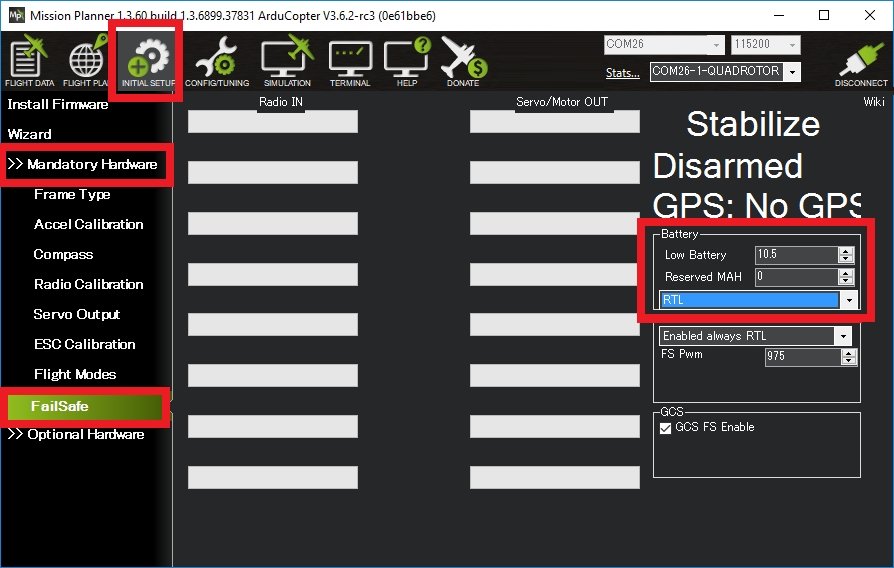
초기 설정 | 필수 하드웨어 | 안전 장치 페이지:
배터리 섹션 매개변수가 회색으로 표시되면 지침에 따라 전원 모듈을 설정하십시오.
"배터리 부족" 임계값 전압(예: 10.5볼트)을 설정합니다.
"예약된 MAH"를 설정하거나 예상 소비 전류를 기준으로 안전 장치가 트리거되지 않아야 하는 경우 "0"으로 두십시오.
드롭다운 목록에서 원하는 동작(Land, RTL, SmartRTL 등)을 선택합니다.
이중 안전 장치
ArduPilot에는 2중 배터리 안전 장치가 포함되어 있습니다. 이를 통해 배터리 전압 또는 남은 용량이 더 낮은 임계값 아래로 떨어지는 경우 후속 조치를 설정할 수 있습니다.
BATT_CRT_VOLT - 보조(낮은) 전압 임계값을 유지합니다. 비활성화하려면 0으로 설정합니다.
BATT_CRT_MAH - 보조(낮은) 용량 임계값을 보유합니다. 비활성화하려면 0으로 설정합니다.
BATT_FS_CRT_ACT - 수행할 보조 조치를 보유합니다. 합리적인 설정은 BATT_FS_LOW_ACT = 2(RTL) 및 BATT_FS_CRT_ACT = 1(Land)을갖는 것입니다.
고급 설정
BATT_FS_VOLTSRC를 사용하면 원시 배터리 전압 또는 새그 보정 전압을 사용할지 여부를 구성할 수 있습니다.
BATT_LOW_TIMER는 안전 장치가 트리거되기 위해 전압이 임계값 미만이어야 하는 시간을 구성할 수 있습니다.
BATTx_매개변수를 설정하여 다른 배터리의 안전 장치를 트리거할 수 있습니다.
Last updated