낙하산

이 항목에서는 수동 및 자동 낙하산 해제를 설정하는 방법에 대해 설명합니다.
경고
낙하산 사출은 위험할 수 있습니다. 이 기능은 주의해서 사용해야 합니다.
필요한 것
다음 중 하나와 같은 완전한 낙하산 메커니즘:
또는 DIY 솔루션을 선호하는 경우 PWM 신호(예: 서보)에 의해 트리거될 수 있는 낙하산 해제 메커니즘과 멀티콥터의 속도를 5m/s 미만으로 늦출 수 있을 만큼 큰 낙하산이 필요합니다. 일부 권장 낙하산 공급업체:
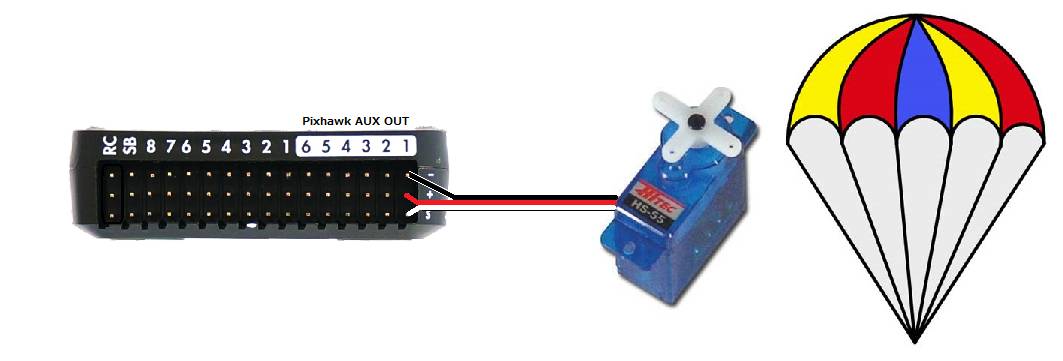
오토파일럿에 연결
낙하산 해제 메커니즘은 릴레이 또는 PWM(예: 서보)에서 트리거될 수 있습니다. 릴레이 핀이 사용되는 경우 낙하산 릴리스가 높은 수준에서 활성화되고 릴레이 핀 기본값인 RELAY_DEFAULT 가 OFF 또는 변경 없음인지 확인하여 초기화 중에 릴리스 트리거를 방지합니다. 부트로더 기간.
미션 플래너를 통한 설정
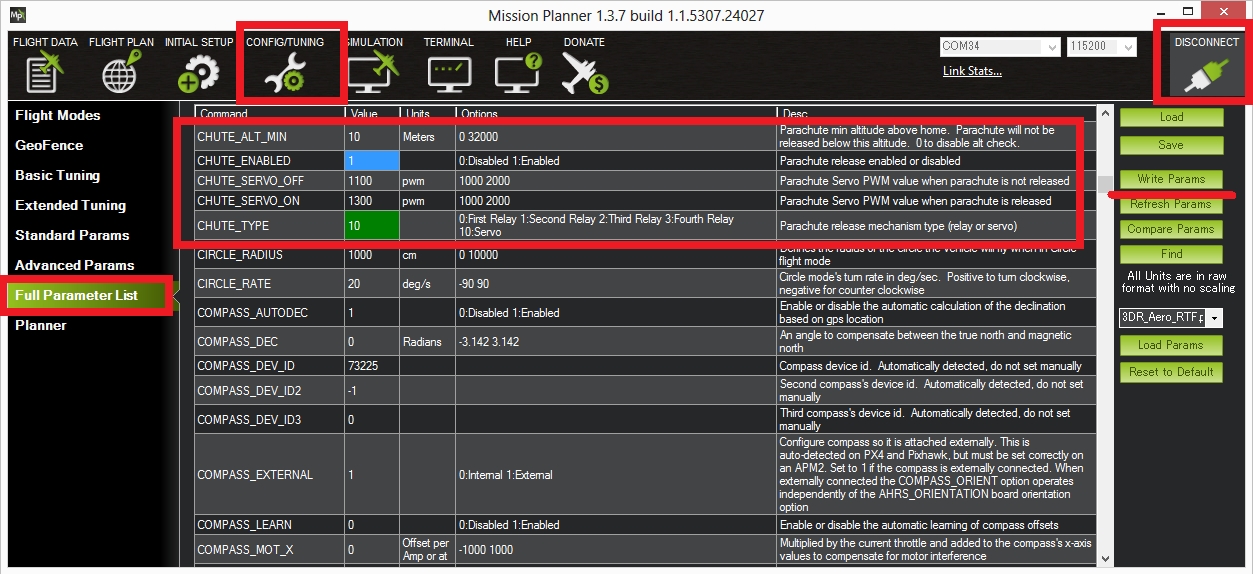
낙하산 해제를 구성하려면 먼저 Mission Planner로 자동 조종 장치에 연결한 다음 CONFIG->전체 매개변수 목록 탭을 열고 다음 매개변수를 설정합니다.
CHUTE_ENABLED = "1". 그런 다음 매개변수를 새로 고치거나 재부팅하여 Chute 매개변수를 확인하십시오.
CHUTE_CRT_SINK는 슈트 릴리스를 트리거할 싱크 속도(m/s)로 설정해야 합니다.
CHUTE_ALT_MIN은 낙하산 해제를 허용하는 HOME 위의 최소 고도를 결정합니다.
서보 릴리스
CHUTE_TYPE = "10" 서보로 해제
CHUTE_SERVO_ON은 낙하산을 해제하는 데 필요한 서보 위치로 설정해야 합니다.
CHUTE_SERVO_OFF는 "휴지" 서보 위치여야 합니다. 즉, 낙하산이 풀리기 전의 서보 위치
SERVO9_FUNCTION = "27" 로 설정하십시오 . IOMCU(MAIN 및 AUX로 표시된 출력)가 있는 자동조종장치에서
SERVO9Pixhawk의 AUX OUT 1을 참조합니다. 대신 AUX OUT2를 사용하려면 SERVO10_FUNCTION을 27로 설정하는 식입니다.
릴레이 해제
핀을 GPIO로 결정/구성합니다( GPIO 참조 ).
해당 핀 번호를 처음 4개(5와 6은 사용할 수 없음) 중 하나로 설정하십시오. RELAY 기능. 즉, 첫 번째 RELAY 기능을 사용하는 GPIO 핀 51의 경우 RELAY_PIN = 51로 설정합니다.
GPIO는 부트로더 기간 동안 초기에 항상 낮게 설정되므로 우발적인 해제를 방지하려면 항상 트리거 및 설정을 위해 높은 출력 수준이 필요한 해제 메커니즘을 사용하십시오.
RELAY_DEFAULT = 1 또는 2(낮음 또는 변경 없음), 포스트 부트로더, 자동 조종 장치 초기화 기간 동안 RELAY 핀이 설정되는 방식을 결정합니다.
CHUTE_TYPE = 0,1,2 또는 3으로 RELAY, RELAY2, RELAY3 또는 RELAY4 기능으로 해제합니다.

수동 해제
조종사는 RC 채널/스위치를 사용하여 낙하산을 수동으로 해제할 수 있습니다. 를 RCx_OPTION22(낙하산 해제) 또는 23(낙하산 3Pos)으로 설정합니다. RC 채널이 CHUTE_ALT_MIN 이상으로 높을 때 작동 하고(Copter) 비행 중(비행기)입니다. 요구 사항은 다음 섹션을 참조하십시오.
MAVLink 명령 릴리스
낙하산은 지상 제어 스테이션 명령 MAV_CMD_DO_PARACHUTE(cmd id #208)를 통해 해제/활성화/비활성화할 수도 있습니다. 이 명령에는 작업을 결정하는 parameter1 필드가 있습니다.
매개변수1
행동
0
낙하산 해제 비활성화
1
낙하산 릴리스 활성화
2
낙하산 해제
이 명령은 DO_PARACHUTE 웨이포인트로서 AUTO 미션의 일부가 될 수 있습니다.
RC 낙하산 비활성화/활성화
RC 채널/스위치를 사용하여 낙하산 자동 해제를 비활성화하거나 활성화할 수 있습니다. an을 RCx_OPTION21로 설정합니다. 높음은 자동 해제 기능을 활성화하고 낮음은 비활성화합니다. 수동 해제는 영향을 받지 않습니다. 23(낙하산 3Pos)으로 설정하면 낮은 위치는 비활성화되고 중간 위치는 자동 작동이 활성화되며 높은 위치는 아래 설명된 활성화 조건을 가정하여 위에 설명된 대로 강제 해제를 시도합니다.
낙하산은 언제 펼쳐질까요?
"Crash Check(충돌 확인)" 기능이 차량이 자세 제어를 잃고 추락하기 시작했다고 판단하면 모터가 멈추고 낙하산이 자동으로 펼쳐집니다. 충돌 검사기가 낙하산 해제를 트리거하려면 다음이 모두 1초 동안 참이어야 합니다.
모터가 무장(콥터) 또는 비행(비행기)
차량이 착륙하지 않음(콥터만 해당)
차량이 FLIP 또는 ACRO 비행 모드가 아닙니다(콥터만 해당).
차량의 롤 및/또는 피치 각도가 목표 기울기 각도에서 30도 떨어져 있습니다(콥터만 해당).
기압계는 차량이 오르지 않고 있음을 보여줍니다(과도한 기압 소음은 경우에 따라 방출을 방지할 수 있음)(콥터 및 비행기)
차량이 CHUTE_ALT_MIN 고도 이상입니다(콥터 및 비행기). "0" 값은 이 검사를 비활성화합니다.
낙하산 테스트
해제 메커니즘에 따라 낙하산 전개는 위험할 수 있으므로 이러한 테스트를 수행할 때 주의를 기울이고 낙하산과 차량 프로펠러를 적절하게 제거하십시오.
수동 배포를 테스트하려면:
릴리스를 비활성화하기 위해 스위치를 사용하는 경우 낙하산 릴리스를 활성화합니다.
최소 고도 확인을 비활성화하려면 CHUTE_ALT_MIN 매개변수를 0으로 설정합니다.
차량을 안정화 모드로 설정하고 스로틀을 최소값 이상으로 올리십시오(모터 분리 또는 소품 제거)(비행기에는 필요하지 않음).
위의 수동 RC 채널 스위치 활성화 방법 중 하나를 사용하거나 Mission Planner SERVO/RELAY 탭을 사용하여 릴리스 릴레이, MAVLink 명령을 전환하거나 릴리스 서보의 PWM을 설정하십시오.
모터가 멈추고 낙하산 해제 메커니즘이 활성화되며 원격 측정이 연결된 경우 "Parachute: Released!"가 표시되어야 합니다. 비행 데이터 화면의 HUD에 나타나야 합니다.
자동 배포를 테스트하려면:
최소 고도 확인을 비활성화하려면 CHUTE_ALT_MIN 매개변수를 0으로 설정합니다.
차량을 안정화 모드로 설정하고 스로틀을 최소값 이상으로 올리십시오.
차량을 낮추는 동안 차량을 적어도 30도 이상 기울입니다(기압계는 차량이 하강하고 있음을 보여줍니다).
1초 후 모터가 멈추고 낙하산 서보가 움직이며 Mission Planner가 부착된 경우 Flight Data 화면의 HUD에 "Parachute: Released"가 나타납니다.
테스트가 완료되면 CHUTE_ALT_MIN을 원하는 고도로 되돌립니다(기본값은 10m).
Last updated