FFT 기반 하모닉 노치 설정
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo
메모
이 기능은 2MB 메모리의 자동 조종 장치에 포함되어 있습니다. 자동조종장치의 보드별 펌웨어 제한 목록을 확인하여 자동조종장치에 이 기능(GyroFFT)이 있는지 확인하십시오. 또한 FFT 기반 Notch는 1개만 설정할 수 있습니다.
ArduPilot은 모든 FFT 설정에 대해 적절한 기본값으로 사전 구성되어 제공됩니다. 필요한 유일한 초기 설정은 다음과 같습니다.
FFT_ENABLE = 1로 설정하여 FFT 엔진을 활성화합니다. 그러면 FFT 지원이 활성화되고 다른 FFT 매개변수가 GCS에 표시되어야 하는 자동 조종 장치를 재부팅해야 합니다. 기본 매개변수 설정을 사용하면 FFT 엔진이 하드웨어에서 일치하는 주파수에 대한 자체 검사를 실행합니다. FFT 오류가 표시되지 않으면 제대로 작동하는 것입니다.
FFT를 활성화한 상태에서 테스트 비행을 먼저 수행하여 항공기의 특정 소음 주파수가 캡처되고 있는지 확인하고 CPU 부하를 모니터링하는 것이 가장 좋습니다. 초기 분석 비행 을 참조하십시오 . 일반적으로 이 결과는 명확한 노이즈 인식과 허용 가능한 CPU 부하를 표시한 다음 FFT를 사용하여 다음 매개변수를 설정하여 고조파 노치를 구동할 수 있습니다.
고조파 노치를 활성화하려면 INS_HNTCH_ENABLE 및/또는 INS_HNTC2_ENABLE = 1을 설정하고 , 고조파 노치를 활성화하려면 1을 설정합니다.
고조파 노치 주파수를 제어하기 위해 FFT 감지 주파수를 사용하려면 INS_HNTCH_MODE 및/또는 INS_HNTC2_MODE = 4 를 설정하십시오 .
INS_HNTCH_REF 및/또는 INS_HNTC2_REF = 1 로 설정하여 고조파 노치 기준 값을 설정합니다. FFT 분석의 경우 일반적으로 스케일링이 없음을 의미합니다.
다른 FFT 관련 고급 매개변수를 기본값으로 사용하는 대부분의 경우 이것이 필요한 전부입니다. 사용자는 기내 FFT 고급 설정 지침에 따라 원하는 경우 테스트 비행 로그를 분석하고 노치 대역폭을 조정하여 필터링 설정을 최적화할 수 있습니다.
메모
FFT 매개변수 설정은 RCx_OPTION송신기 스위치의 보조 기능 "162"를 사용하여 자동으로 수행할 수 있습니다. 기능을 송신기의 스위치로 설정하십시오. 차량을 호버링하고 30초 동안 스위치를 켠(높음) 다음 다시 로우로 전환하고 착륙합니다. 매개변수가 설정되고 스위치 기능이 제거됩니다. 참고: 펌웨어 버전 4.3에서는 이 기능을 사용하지 마십시오!
In-Flight FFT를 사용하면 FFT 계산에 시간이 걸리고 실제 필요한 중심 주파수를 지연시킬 수 있으므로 적절하게 설정된 스로틀 기반 노치 필터 보다 성능이 저하될 수 있습니다 . In-Flight FFT는 고부하와 저부하로 작동하는 대형 리프트 차량과 같이 차량의 로터 주파수가 광범위하게 변할 때 유용합니다. 스로틀 기반 노치 필터를 설정하는 것이 유용할 수 있지만 자세한 내용은 비행 중 FFT 고급 설정 지침을 참조하십시오.
FFT 옵션
FFT 연산에 영향을 미치는 FFT_OPTIONS 매개변수 에서 적절한 비트를 설정하여 선택할 수 있는 두 가지 옵션이 있습니다 .
포스트 필터 체인 FFT 분석 창
일반적으로 중심 주파수 조정을 위한 FFT 분석은 필터링되지 않은 자이로 데이터의 출력에서 직접 노이즈를 측정하여 수행됩니다. 그러나 FFT_OPTIONS 의 비트 0 이 설정되면 측정 창은 저역 통과 필터 및 구성된 노치 필터의 효과를 고려합니다. 이는 필터 체인의 끝에서 저역 통과로 인해 제어 응답에 덜 영향을 미치는 고주파 노이즈가 있는 경우에 유용하지만 FFT 측정의 대상이 될 수 있습니다. 이 비트를 설정하면 더 낮은 주파수와 더 중요한 노이즈 피크만 추적합니다.
모터 소음 확인
FFT_OPTIONS 의 비트 1이 설정되고 ESC 모터 rpm 원격 측정을 사용할 수 있는 경우 FFT의 측정 창은 ESC 원격 측정에서 보고된 모터 주파수를 중심으로 합니다. 40dB 이상의 모터 소음이 필터 체인을 통과하면 GCS 경고 메시지를 생성하고 수준, 모터 번호 및 주파수를 식별합니다. 이 비트는 비트 0도 설정된 상태로 사용해야 합니다.
일반적인 사용
FFT 노치 필터의 일반적인 용도는 다른 동적 고조파 노치 필터(스로틀, ESC 또는 RPM 기반)에 추가하는 것입니다. 이러한 구성에서 사후 LPF FFT 창 FFT_OPTIONS 비트를 사용하면 FFT 필터를 다른 노치 필터 및 자이로 LPF( INS_GYRO_FILTER) 에 의해 필터링되지 않은 대상 노이즈에 배치하여 최상의 전체 필터링 결과를 얻을 수 있습니다 .
초기 비행 및 비행 후 분석
고도 유지 상태에서 최소 30초 동안 호버링 비행을 수행하고 하모닉 노치를 활성화하지 않고 데이터 플래시 로그를 다운로드합니다 .
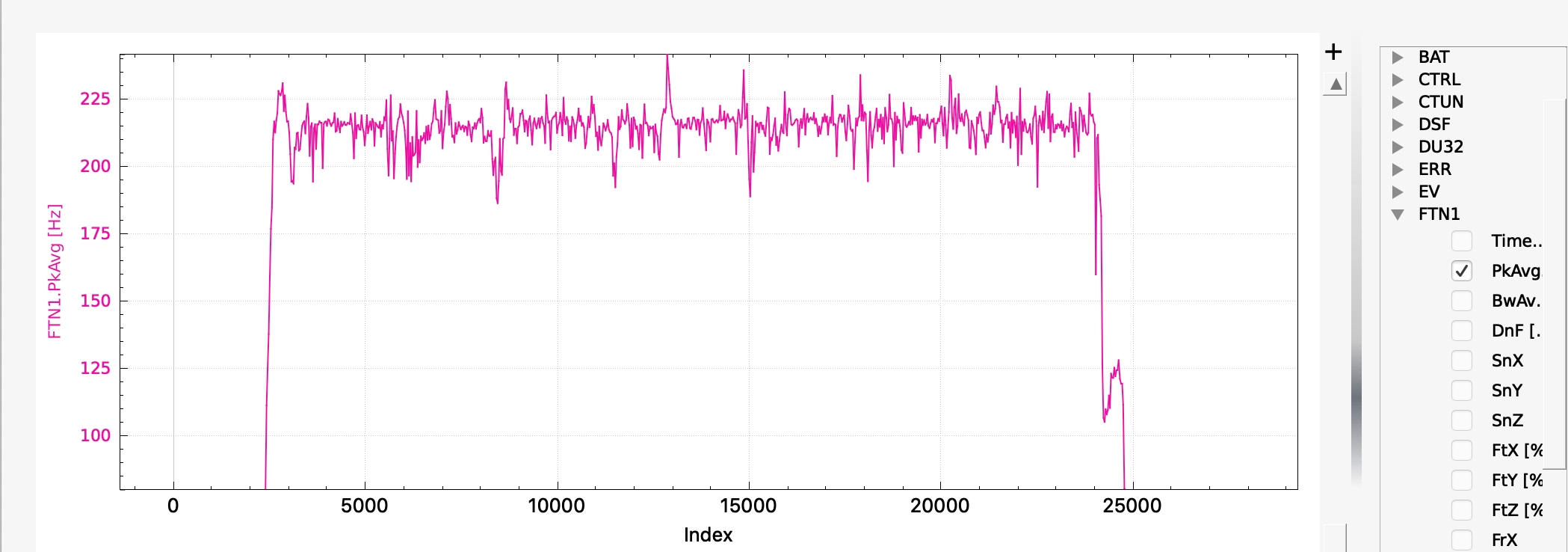
롤 및 피치에 대한 평균 노이즈 주파수의 FFT 에너지 가중 추정치를 나타내는 로그 요소 FTN1.PkAvg를 그래프로 표시합니다.
그래프에는 모터 회전 주파수에 해당하는 노이즈 피크의 상당히 일관된 추정치가 있어야 합니다. 작은 헬리콥터에서는 약 200Hz이고 더 큰 헬리콥터/쿼드플레인에서는 100Hz 정도입니다. 다음은 Pixracer에서 실행되는 5인치 쿼드의 예입니다. 조종사가 스로틀링하면 약 220Hz에서 상당히 일관된 소음 수준이 있습니다.
일관된 추정치를 얻은 경우 비행 중 FFT 기반 고조파 노치 설정 에 설명된 대로 고조파 노치를 활성화할 수 있습니다 .
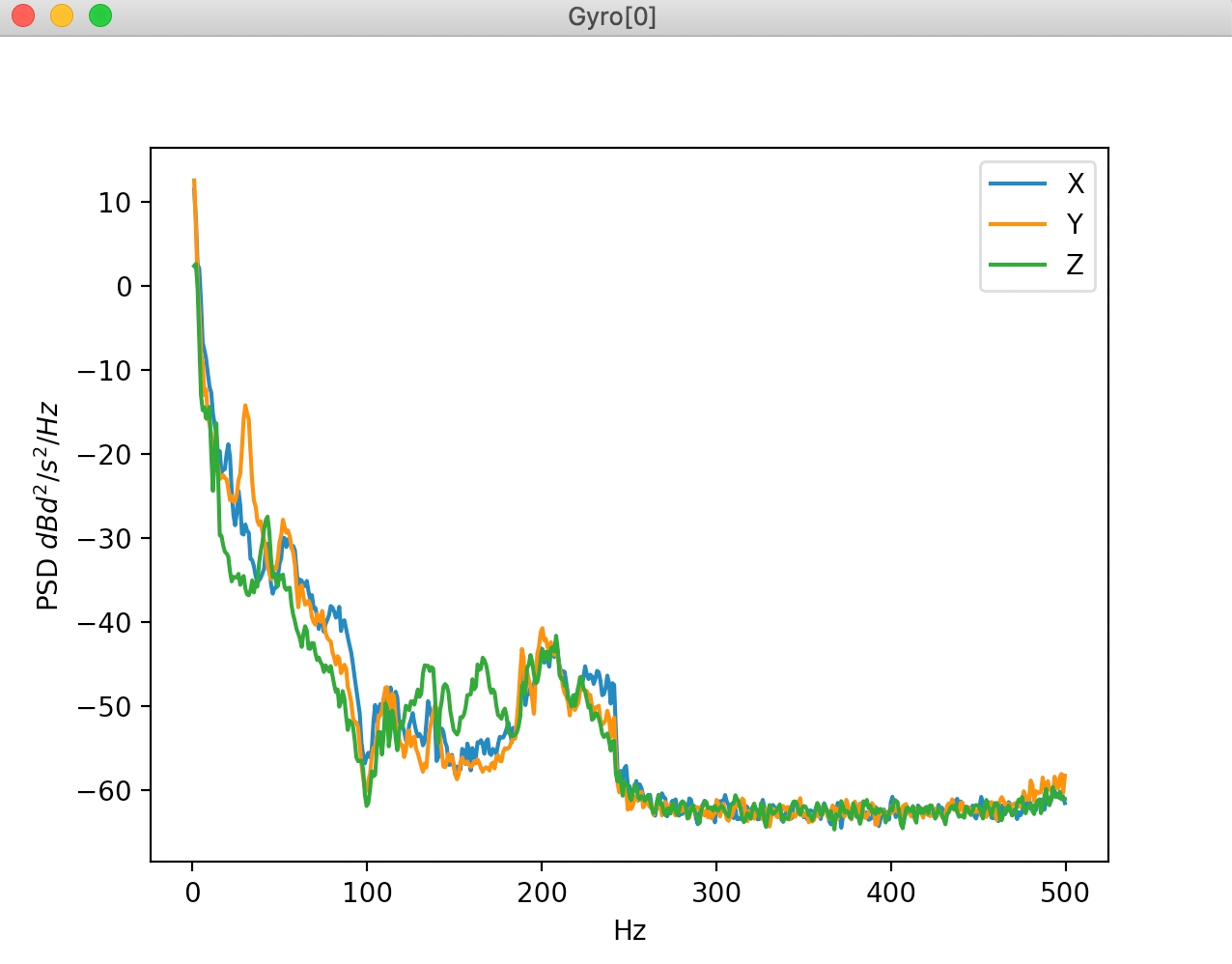
이 비행에서는 동적 고조파 노치가 활성화되었고 FFT 결정 주파수를 추적하도록 설정되었으며 포스트 필터 로그의 FFT 분석은 자이로 노이즈가 효과적으로 제거되었음을 보여줍니다.
추가 정보
이 기능의 작동 방식에 대한 세부 정보와 사용자가 일반적으로 조정하지 않는 일부 고급 매개변수의 장단점에 관심이 있는 사용자를 위해 In- Flight FFT: 작동 방식 문서에서 작업 및 이러한 고급 매개변수를 설명합니다.
Last updated