튜닝을 위한 기체 설정
기체 사양에 따라 다음 매개변수를 올바르게 설정해야 합니다. 각각은 튜닝 프로세스의 품질에 영향을 미칩니다.
배터리 설정
VTOL 모터의 추력 곡선이 가능한 선형이 되도록 하는 것이 매우 중요합니다. 선형 추력 곡선은 모터가 생성하는 실제 추력의 변화가 ArduPilot에서 요구하는 추력에 정비례한다는 것을 의미합니다. 추력 곡선이 심하게 비선형이면 결코 좋은 튜닝을 할 수 없으며 어떤 경우에는 차량이 완전히 불안정해지고 충돌할 수 있는 나쁜 튜닝으로 끝날 수 있습니다.
비선형 추력 곡선에는 3가지 일반적인 원인이 있습니다.
스로틀이 증가함에 따라 전압 강하.
ESC에 사용하는 PWM 범위의 잘못된 끝점 설정(아래 "모터 설정" 참조)
프로펠러, ESC 및 모터 조합에 의해 생성된 추력의 비선형성
전압 처짐에 대처하기 위해 전압 범위를 설정하는 것부터 시작하십시오. 모터 추력 곡선을 선형화하는 데 사용되는 매개변수입니다.
MOT_BAT_VOLT_MAX : 4.2vx 셀 수
MOT_BAT_VOLT_MIN : 3.3vx 셀 수
다음 설정 추력 엑스포. 전문 항공기를 설정하는 경우 스로틀을 변경할 때 모터/ESC/프로펠러 조합의 실제 추력을 정확하게 측정할 수 있도록 추력 스탠드에 투자해야 합니다. 그런 다음 끝점 사이의 추력이 가능한 선형이 되도록 끝점(아래 모터 설정에서 제공)과 함께 expo 값을 조정합니다. 추력 곡선에 대한 제조업체 데이터는 종종 부정확하므로 신뢰하지 마십시오. 추력 스케일링에 대한 자세한 내용은 모터 추력 스케일링을 참조하십시오 .
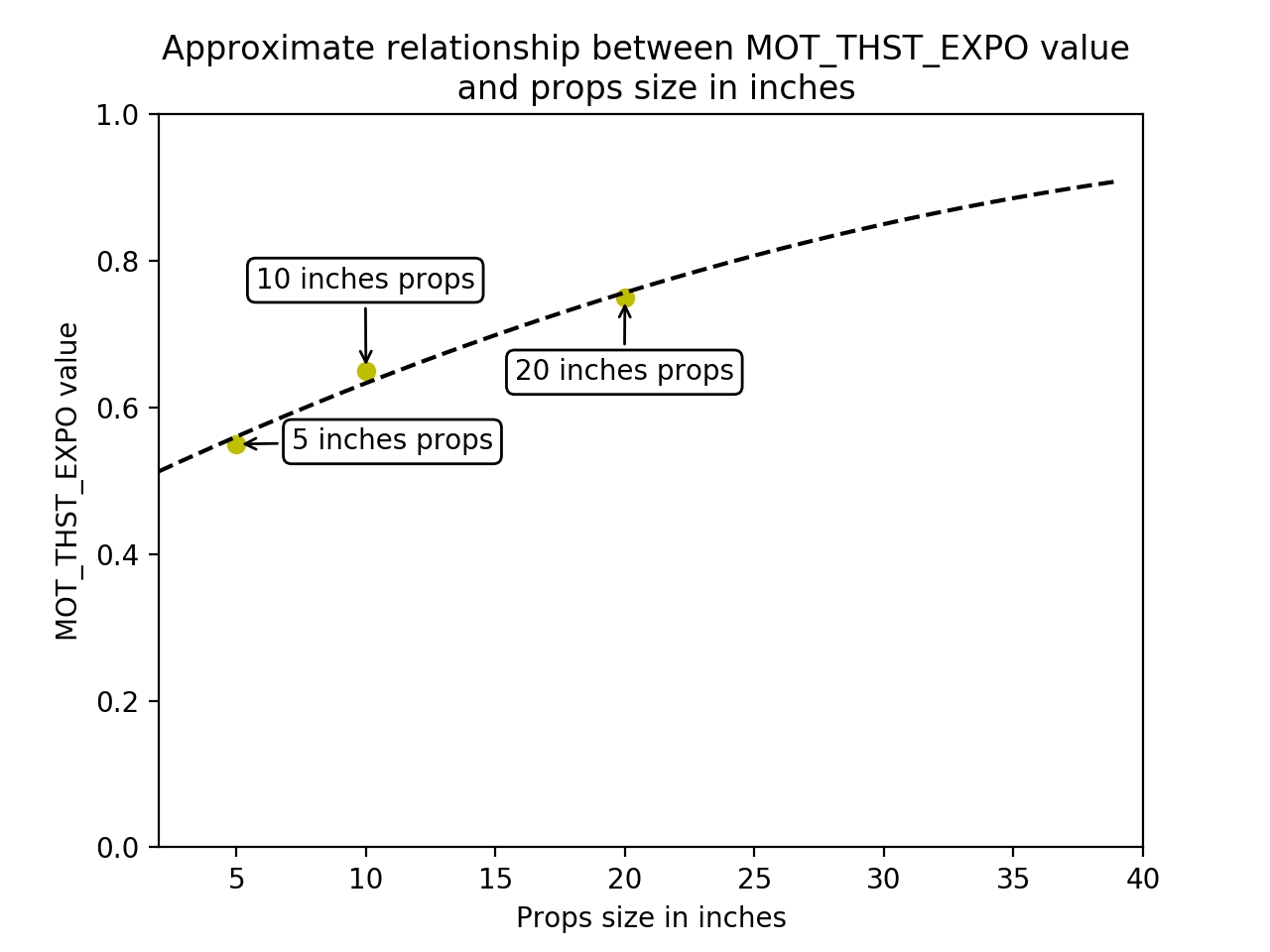
취미 등급 차량을 설정하는 경우 아래 그래프를 사용하여 항공기에 대한 올바른 MOT_THST_EXPO 값을 추정할 수 있습니다.
MOT_THST_EXPO : 5인치 소품의 경우 0.55, 10인치 소품의 경우 0.65, 20인치 소품(또는 그 이상)의 경우 0.75입니다. 이 매개변수는 최상의 결과를 위해 스러스트 스탠드 측정에 의해 파생되어야 합니다(제조업체 데이터를 신뢰하지 마십시오).
모터 설정
모터 매개변수는 ESC로 전송되는 PWM 출력 범위를 정의합니다. 이는 비행 중에 사용되는 스로틀 값의 전체 범위가 추진 시스템의 선형 범위 내에 있는지 확인하는 데 중요합니다.
ESC로 전송되는 출력 범위를 정의하는 데 사용되는 매개변수입니다.
MOT_PWM_MAX : 고정 범위 또는 2000us에 대한 ESC 설명서 확인
MOT_PWM_MIN : 고정 범위 또는 1000us에 대한 ESC 설명서 확인
MOT_SPIN_ARM : 모터 테스트 기능을 사용하여 무장 상태의 표시로 낮은 rpm에서 모터 회전을 안정적으로 시작하는 값을 결정합니다.
MOT_SPIN_MAX : 0.95
MOT_SPIN_MIN :가능한 경우 모터 테스트 기능 과 모터 테스트 데이터를 사용하여 선형 추력의 하한 범위를 설정합니다. 기본값은 일반적으로 취미용으로 적합합니다.
MOT_THST_HOVER : 예상되는 실제 호버 추력 비율의 0.25 이하(낮을수록 안전함)
PID 컨트롤러 초기 설정
아래 설정은 PID 컨트롤러 가속 및 필터 설정을 차량에 적합한 대략적인 범위로 설정하기 위한 것입니다. 이러한 매개변수는 튜닝 프로세스에 중요합니다. 축 P/D/I 값에 대한 PID 컨트롤러 기본값은 일반적으로 대부분 차량의 첫 번째 테스트 호버링에 대해 안전합니다.
INS_ACCEL_FILTER : 10Hz
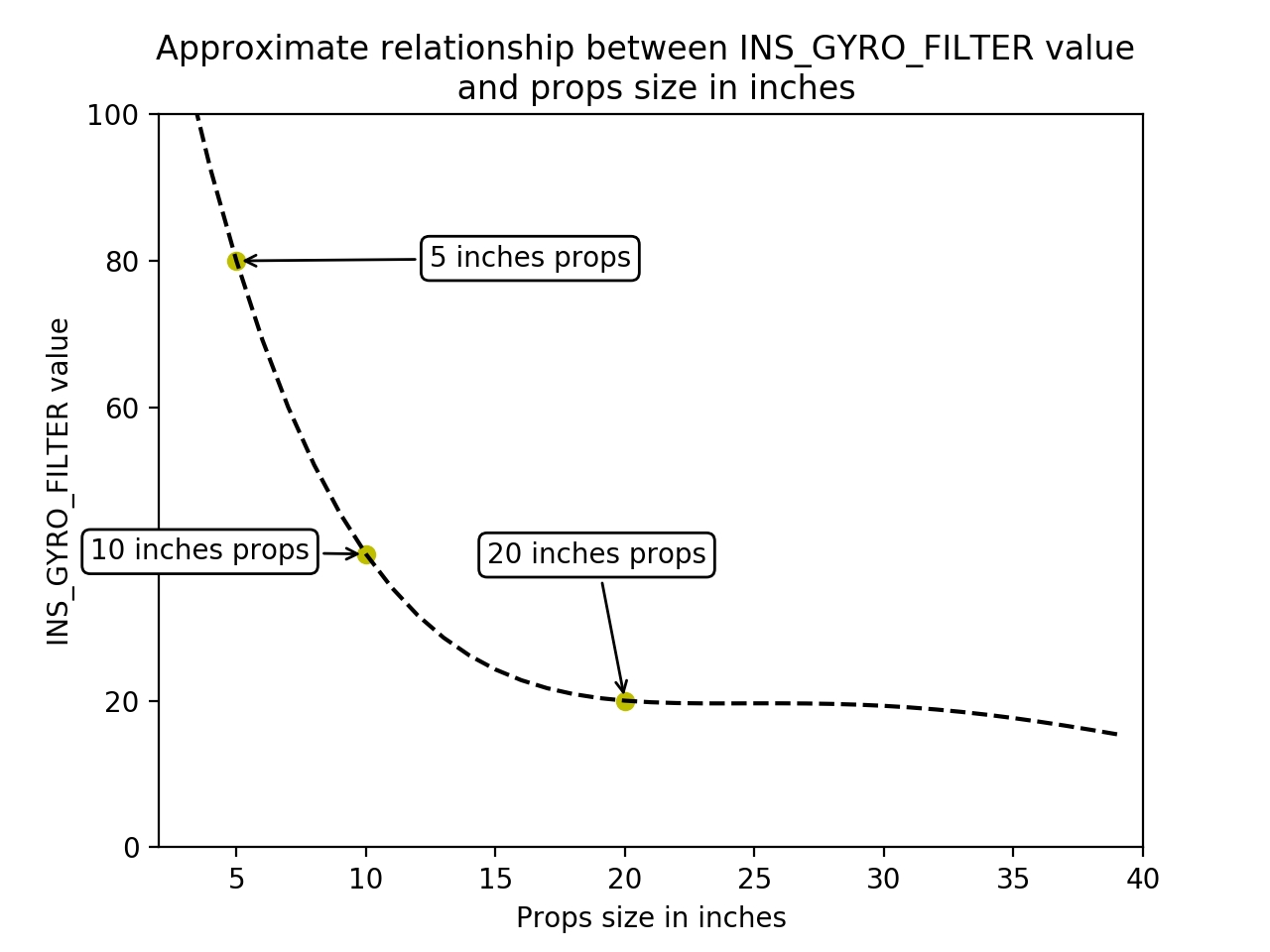
INS_GYRO_FILTER : 5인치 소품의 경우 80Hz, 10인치 소품의 경우 40Hz, 20인치 소품의 경우 20Hz(또는 그 이상)
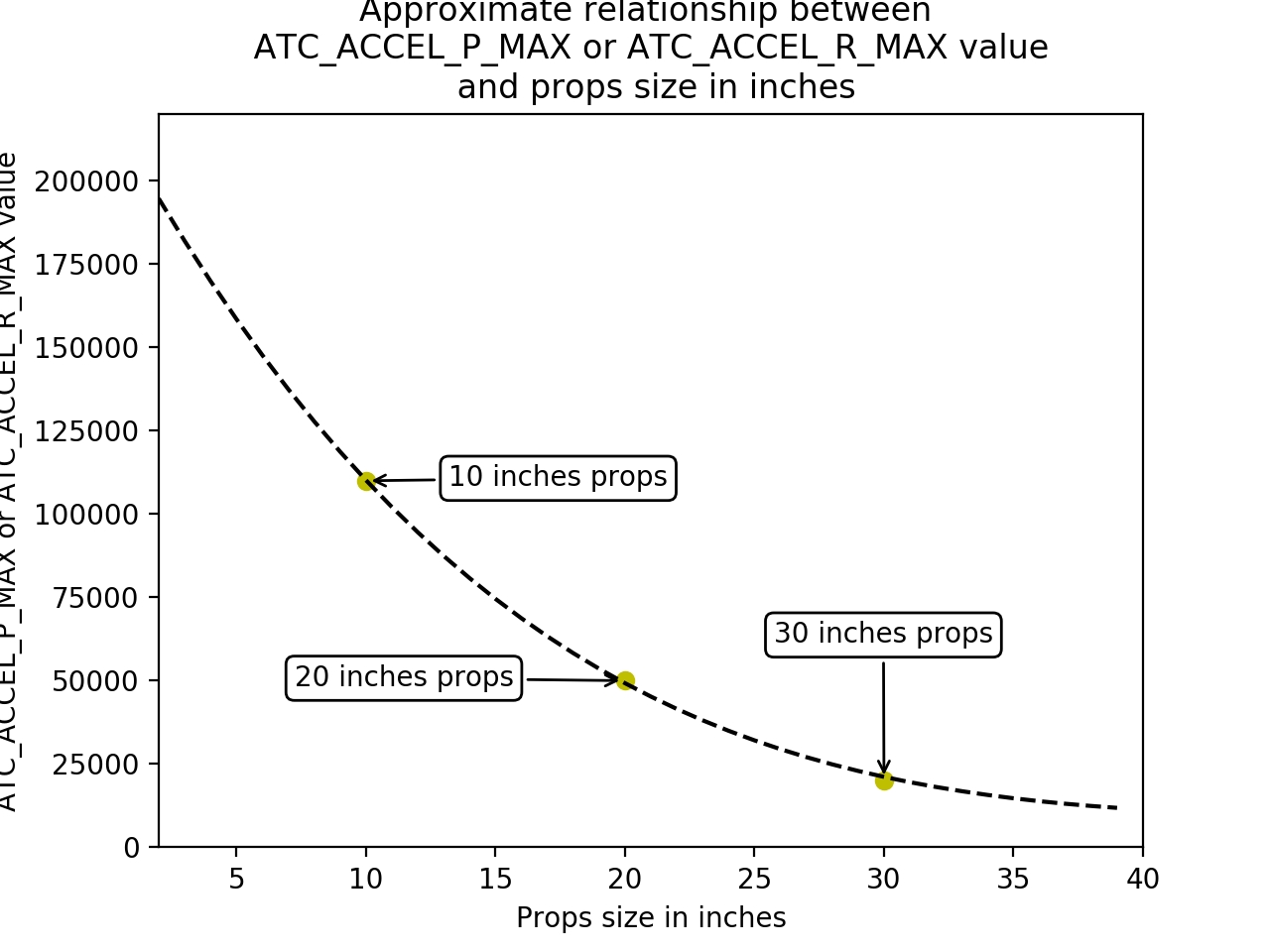
ATC_ACCEL_P_MAX : 10인치 소품의 경우 110000, 20인치 소품의 경우 50000, 30인치 소품의 경우 20000
ATC_ACCEL_R_MAX : 10인치 소품의 경우 110000, 20인치 소품의 경우 50000, 30인치 소품의 경우 20000
ATC_ACCEL_Y_MAX : 10인치 소품의 경우 27000, 20인치 소품의 경우 18000, 30인치 소품의 경우 9000
Copter-4.1(이상)의 경우:
ATC_RAT_YAW_FLTE : 2

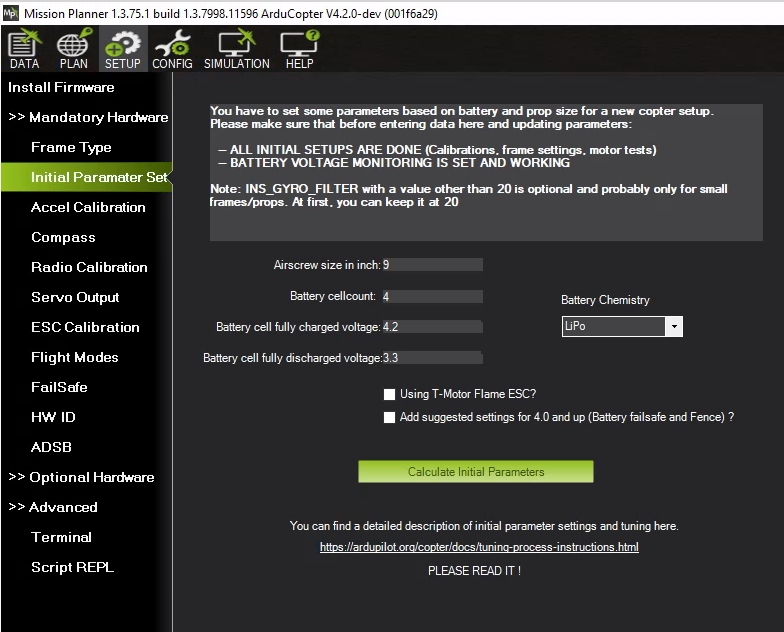
미션 플래너 도우미
위의 매개변수를 쉽게 설정할 수 있도록 Mission Planner에 SETUP/Mandatory Hardware/Initial Parameter Setup 탭이 제공됩니다.
Last updated