진동 측정
자동 조종 장치에는 진동에 민감한 가속도계가 있습니다. 이러한 가속도계 값은 기압계 및 GPS 데이터와 결합되어 차량의 위치를 추정합니다. 과도한 진동이 있는 경우 정확한 포지셔닝에 의존하는 모드(예: Copter: AltHold, Loiter, RTL, Guided, Position 및 자동 비행 모드)에서 예측이 실패하고 매우 나쁜 성능으로 이어질 수 있습니다.
이 지침은 진동 수준을 측정하는 방법을 설명합니다. 허용 범위를 벗어난 경우 진동 감쇠 페이지에 있는 조언을 따르십시오.
Ground Station에서 실시간 보기
Ground Station은 진동 및 클리핑에 대한 실시간 보기를 표시할 수 있습니다. Mission Planner를 사용하는 경우 HUD에서 "Vibe"를 클릭하면 현재 진동 수준이 표시됩니다.

30m/s/s 미만의 진동 수준은 일반적으로 허용됩니다. 30m/s/s 이상의 레벨에는 문제가 있을 수 있으며 60m/s/s 이상의 레벨에서는 거의 항상 위치 또는 고도 유지에 문제가 있습니다.
Vibe Dataflash 로그 메시지
녹음된 바이브 레벨이 대부분 30m/s/s 미만인지 확인하십시오.
최소한 몇 분 동안 정기적인 비행(예: 부드러운 호버링이 아님)을 수행하고 데이터플래시 로그를 다운로드합니다 .
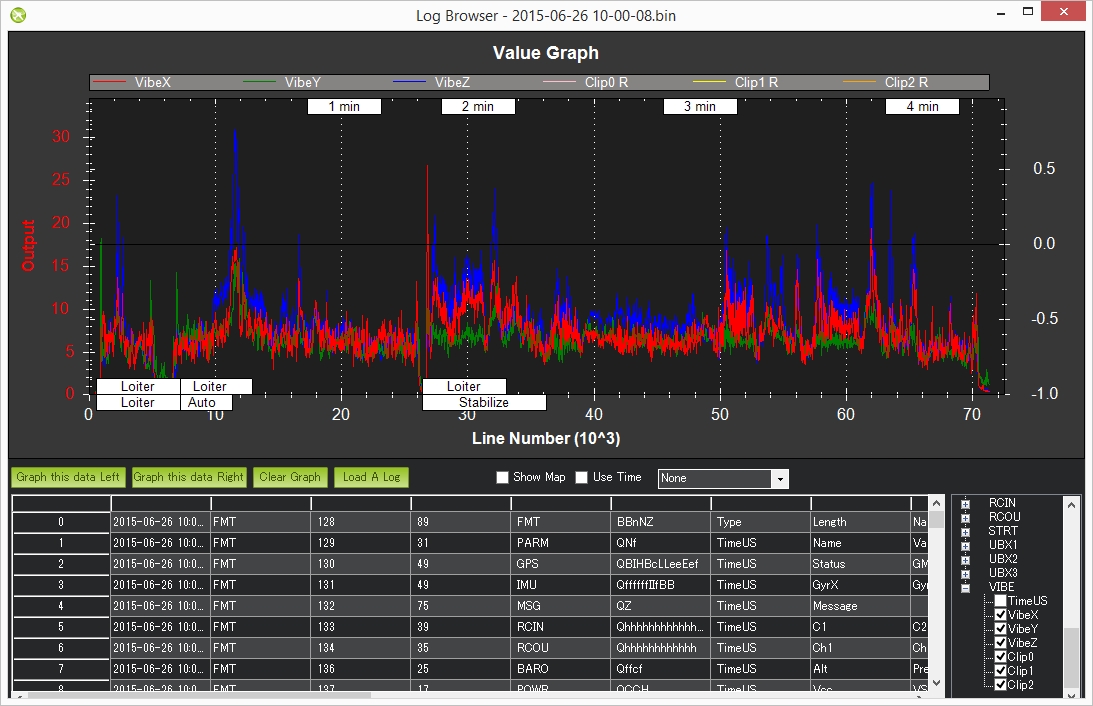
Mission Planner 또는 기타 지상국을 사용하여 VIBE 메시지의 VibeX, VibeY 및 VibeZ 값을 그래프로 표시합니다. 기본 가속도계 출력의 표준 편차를 m/s/s로 표시합니다. 3DR IRIS에서 가져온 아래 이미지는 15m/s/s 미만이지만 때때로 최고 30m/s/s인 정상 수준을 보여줍니다. 최대 허용 값은 30m/s/s 미만으로 나타납니다(아래 두 번째 그림 참조).
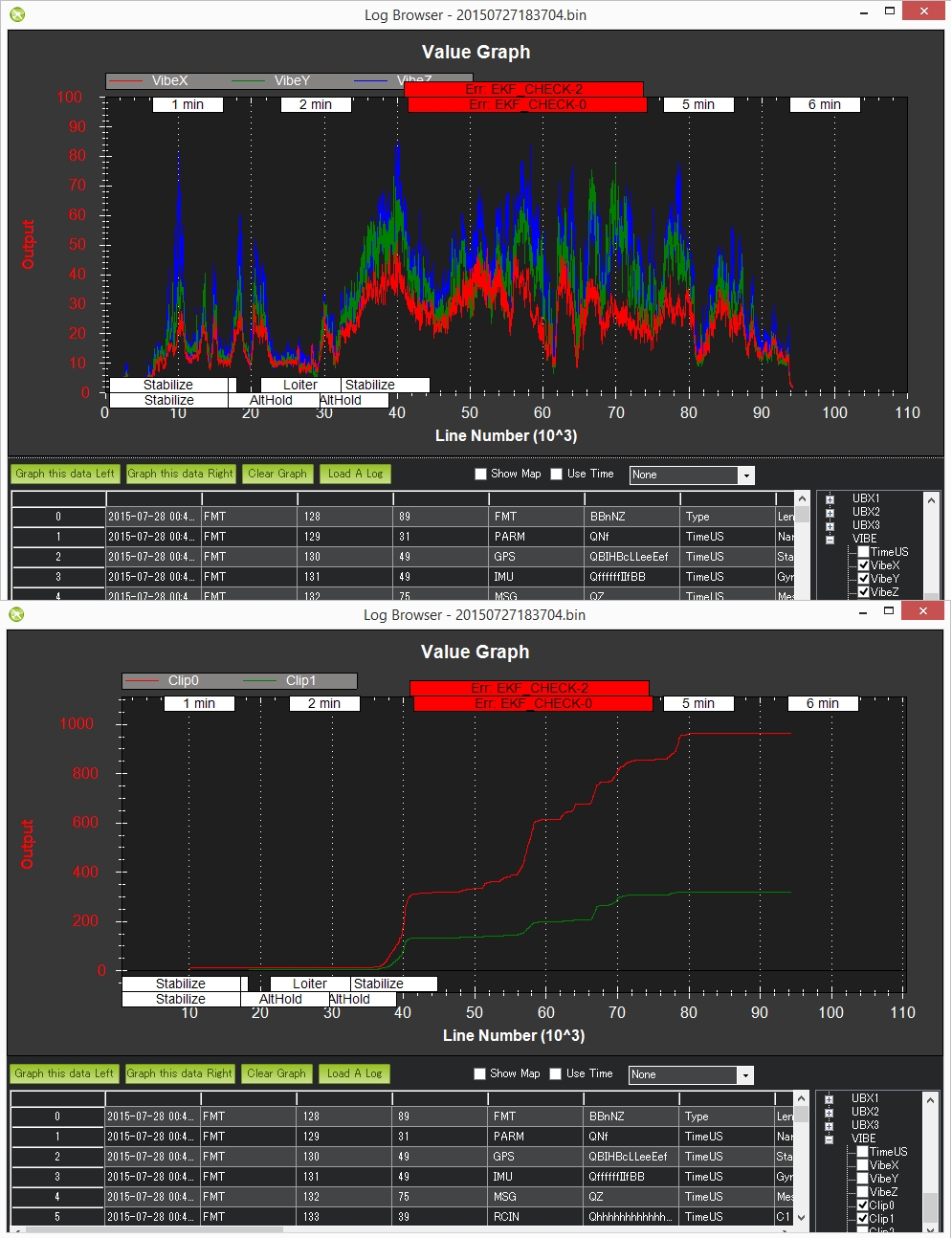
가속도계 중 하나가 최대 한계(16G)에 도달할 때마다 증가하는 Clip0, Clip1 및 Clip2 값을 그래프로 표시합니다. 이상적으로는 전체 비행에 대해 0이어야 하지만 낮은 숫자(<100)는 특히 경착륙 중에 발생하는 경우 괜찮을 수 있습니다. 로그를 통해 정기적으로 증가하는 숫자는 수정해야 하는 심각한 진동 문제를 나타냅니다 .
이것은 높은 진동으로 인해 위치 추정 문제가 있었던 차량의 예입니다.
진동 수준을 계산하는 알고리즘은 AP_InertialSensor.cpp의 calc_vibration_and_clipping() 메서드 에서 볼 수 있지만 간단히 말해서 다음과 같이 가속도계 판독값의 표준 편차를 계산하는 것과 관련됩니다.
기본 IMU에서 원시 x, y 및 z 가속도계 값 캡처
5hz에서 원시 값을 하이패스 필터하여 차량의 움직임을 제거하고 x,y 및 z축에 대한 "accel_vibe_floor"를 생성합니다.
최신 가속 값과 accel_vibe_floor 간의 차이를 계산합니다.
위의 차이를 제곱하고 2hz에서 필터링한 다음 제곱근(x, y 및 z에 대해)을 계산합니다. 이 마지막 세 값은 VIBE 메시지의 VibeX, Y 및 Z 필드에 나타나는 값입니다.
통나무의 진동을 볼 때 가장 먼저 살펴봐야 할 것은 클리핑입니다. 클리핑이 0이면 좋은 것입니다. 즉, 감지되는 진동이 IMU를 압도하지 않습니다.
진동 문제를 해결할 때 문제를 찾기 위한 출발점으로 진동 축을 고려하십시오.
X와 Y가 모두 높으면 모터 베어링이나 프롭 균형에 문제가 있을 수 있습니다. 또는 FC에 더 많은/더 나은 전체 진동 감쇠가 필요할 수 있습니다. X OR Y가 높으면 FC 마운팅에 문제가 있을 수 있습니다. 와이어가 FC에서 튀거나 억제하고 있을 수 있습니다. 또는 진동 감쇠가 한 축에서 다른 축보다 더 잘 작동할 수도 있습니다. Z 진동이 있는 경우 프로펠러(날이 구부러짐) 또는 모터의 수직 유격에 트랙 문제가 있을 수 있습니다.
또한 일부 비행 조건/기체에 따라 자연 진동이 다를 수 있음을 고려하십시오. 호버링 시 진동이 양호해 보이지만 속도에 따라 증가하는 경우 기체 또는 바람에 공기역학적 문제가 있을 수 있습니다.
"The Leans"를 찾습니다.
기울기는 조종사가 수평 비행을 명령하고 있음에도 불구하고 차량의 자세 추정이 부정확하여 크게 기울어질 때 발생합니다. 문제의 원인은 종종 각 추정 시스템(예: 각 AHRS 또는 EKF)의 롤 및 피치 자세 추정을 비교하여 확인할 수 있는 가속도계 앨리어싱입니다. 태도 추정치는 서로 몇 도 이내여야 합니다.
데이터 플래시 로그를 다운로드하고 지상국의 로그 뷰어에서 엽니다.
EKF2를 사용하는 경우 AHRS2.Roll, NKF1[0].Roll 및 NKF1[1].Roll을 비교하고, EKF3을 사용하는 경우 AHRS2.Roll, XKF1[0].Roll 및 XKF1[1].Roll을 비교합니다.
아래 이미지는 태도가 잘 일치하는 일반적인 로그를 보여줍니다.

FFT를 사용한 고급 분석
대량의 IMU 데이터를 수집하고 FFT 분석을 수행하여 진동이 가장 많은 주파수를 결정하는 방법에 대한 지침은 IMU 배치 샘플러로 진동 측정 페이지를 참조하십시오 .
IMU Dataflash 로그 메시지
Vibe 메시지를 포함하지 않는 아주 오래된 버전의 ArduPilot의 경우 IMU 값을 직접 확인할 수 있습니다.
LOG_BITMASK 매개변수가 IMU 데이터를 포함하도록 설정되어 가속도계 값이 dataflash 로그에 기록되는지 확인하십시오.
Stabilize 모드에서 콥터를 조종하고 수평 호버링을 유지하십시오(완벽하게 안정되거나 수평일 필요는 없음).
dataflash 로그를 다운로드하고 다운로드가 완료된 후 Mission Planner의 "Review a Log" 버튼을 사용하여 로그 디렉토리에서 최신 파일을 엽니다(마지막 숫자는 다운로드한 로그 번호이므로 위의 예에서 Log #를 다운로드했습니다. 1이므로 파일 이름은 1.log로 끝납니다.)
로그 브라우저가 나타나면 IMU 메시지를 찾을 때까지 아래로 스크롤합니다. 행의 AccX를 클릭하고 이 데이터 그래프 왼쪽 버튼을 누릅니다. AccY 및 AccZ 열에 대해 반복하여 아래와 같은 그래프를 생성합니다.

왼쪽의 눈금을 확인하고 AccX 및 AccY의 진동 수준이 -3에서 +3 사이인지 확인하십시오. AccZ의 경우 허용되는 범위는 -15에서 -5까지입니다. 매우 가깝거나 이러한 제한을 초과하는 경우 가능한 솔루션에 대해 Vibration Damping 페이지를 다시 참조해야 합니다.
위의 모든 작업이 완료된 후 Mission Planner의 표준 매개변수 페이지로 이동하여( 연결 버튼을 다시 눌러야 할 수 있음) Log Bitmask를 다시 "Default"로 설정합니다. 이는 특히 APM 로깅에서 상당한 CPU 리소스가 필요하고 실제로 필요하지 않은 경우 이를 로깅하는 것은 낭비이기 때문에 중요합니다.
Last updated