추력 손실 및 요 불균형 경고
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
추력 손실 또는 요 불균형 경고가 표시되는 경우 이 페이지에서는 문제를 해결하기 위해 수행해야 하는 몇 가지 확인 및 수정 사항을 설명합니다. 대부분의 경우 이러한 경고는 잘못된 하드웨어 선택 또는 설정의 결과입니다.
이러한 경고는 추진 시스템의 하드웨어 오류를 감지하도록 설계되었으며, 경고 없이 비행한 차량에서 오류가 발생하기 시작하면 추진 시스템을 확인해야 합니다. 더 큰 탑재량과 강한/돌풍이 있을 때 경고가 발생할 가능성이 더 큽니다.
잠재적 추력 손실 (Potential Thrust Loss)
Potential Thrust Loss)잠재적인 추력 손실 메시지가 GCS 또는 데이터 플래시 로그에 표시되면 원인과 해결 방법을 찾기 위해 조사를 수행해야 합니다. 경고는 다음과 같은 모터 번호를 제공합니다.
`Potential Thrust Loss (3)`
이러한 경고는 모터가 100% 스로틀에서 포화된 결과입니다. 이 포화로 인해 ArduCopter는 더 이상 요청된 롤, 피치, 요 및 스로틀 출력을 달성할 수 없습니다. 이것이 장기간 지속되면 차량의 고도 및 자세 제어 기능이 저하되어 충돌할 수 있습니다.
호버링 또는 편안한 비행에서 이러한 메시지가 표시되면 하드웨어에서 문제를 해결해야 합니다. 차량의 추력 대 중량비는 추진력을 변경하거나 질량을 줄임으로써 증가시켜야 합니다.
등반 및 공격적인 기동에서만 볼 수 있는 경우 요청된 가속 및 속도를 낮추는 것으로 충분할 수 있습니다. 다시 한 번 차량의 추력 대 중량 비율을 증가시켜 더 높은 가속과 속도를 허용할 수 있습니다.
Yaw 불균형
요 불균형 경고는 요 출력이 포화되기 전에 차량이 요잉하기 위해 얼마나 열심히 작동하는지 측정한 것입니다. 요 출력이 포화되면 요를 유지하는 차량의 기능이 저하됩니다. 그리고 최악의 경우 차량이 빠르게 회전하게 됩니다. 경고 메시지는 최대 요 출력의 백분율을 제공합니다. 100%에서는 포화 상태입니다. 예를 들어:
`Yaw Imbalance 87%`
가리키면 문제가 하드웨어에서 해결되어야 합니다. 파일럿 요 입력 없이 값이 증가하면 차량을 즉시 착륙시켜야 합니다. Yaw 불균형은 반대편 모터의 쌍 사이의 PWM 출력을 비교하여 dataflash 로그에서 인식할 수 있습니다. 아래와 같이 시계 방향 모터와 반시계 방향 모터 사이에 스로틀 레벨 차이가 크게 나타납니다.
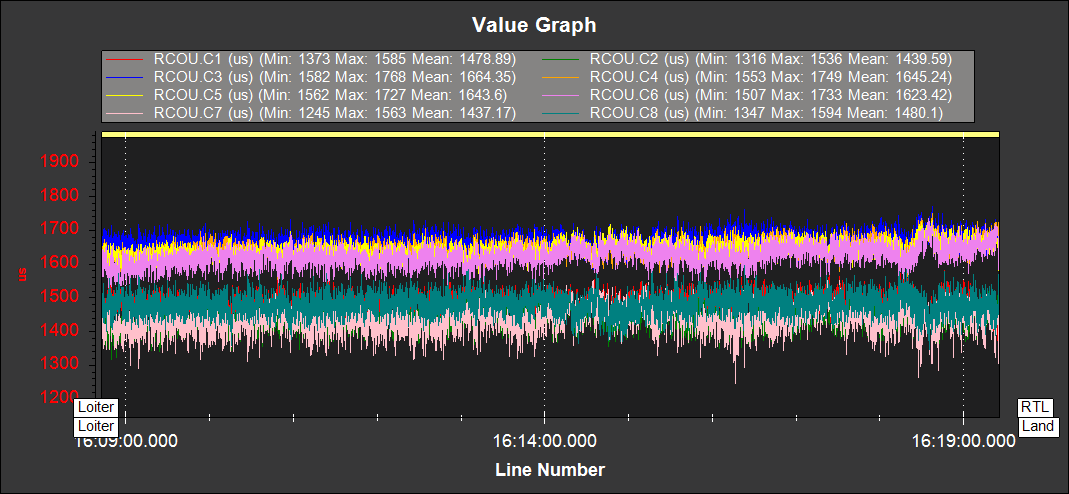
이것은 하드웨어에서 수정되어야 합니다. 가장 일반적인 원인은 원형 암에서 모터가 수직이 아닌 것입니다. 불균형이 여전히 지속되면 추력 각도가 회전 방향에 대한 요를 지원하도록 모터를 약간 기울일 수 있습니다. 일부 차량은 모터 추력 벡터에 매우 민감할 수 있습니다.
공격적인 요 기동에서만 경고가 표시되는 경우 ATC_RAT_YAW_IMAX를 올려 경고 임계값을 높일 수 있습니다 . 그러나 yaw tune을 다시 방문할 가치가 있을 수도 있습니다.
메모
FLIGHT_OPTIONS 매개변수를 사용하여 추력 손실 및 요 불균형 경고를 비활성화할 수 있습니다 . 이 작업은 광범위한 로그 검토 및 경고가 실제 문제를 포착하지 않는지 확인하기 위한 테스트 후에만 수행해야 합니다.
Last updated