자동 트림
저작권: 쿼드(QUAD) 드론연구소 https://www.youtube.com/@quad-robotics
물론 바람은 콥터에 강한 영향을 미치며 콥터를 밀어냅니다. 그러나 안정화 모드로 비행하는 동안 바람이 없는 환경에서도 콥터가 항상 같은 방향으로 표류하는 경향이 있음을 알 수 있습니다. 이것은 "Save Trim" 또는 "Automatic Trim" 기능을 사용하여 대부분 수정할 수 있습니다.
메모
대부분의 사용자에게는 가속도계 보정이 트림 값을 잘 설정하기 때문에 이 절차가 필요하지 않습니다.
트림 저장
트림 저장은 더 간단한 방법이며 기본적으로 무선 송신기의 트림을 자동 조종 장치로 전송하는 것과 관련됩니다( 비디오 데모는 여기 참조 ).
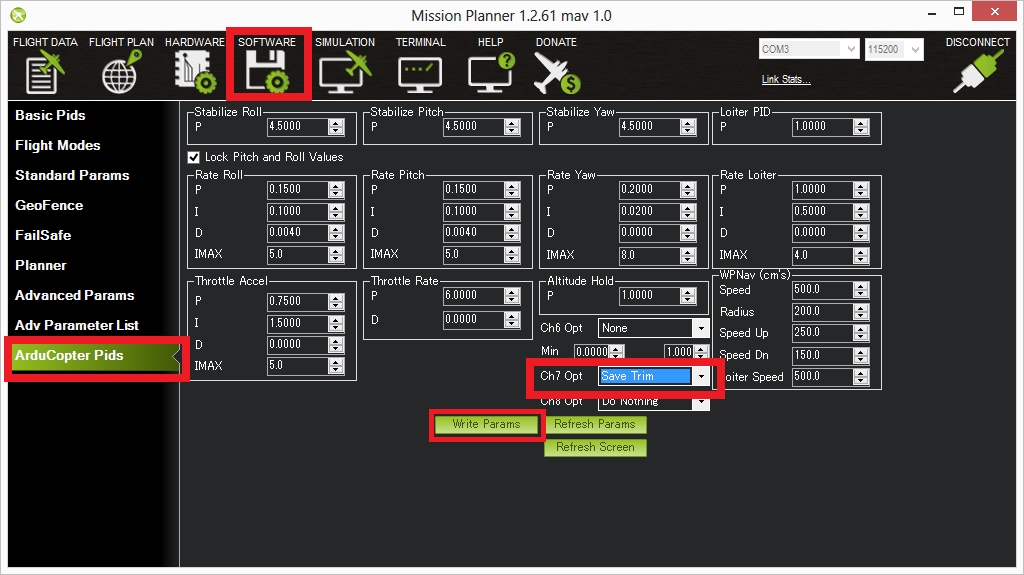
MissionPlanner의 하드웨어 > 필수 하드웨어 > 무선 보정 화면에서 CH7 스위치가 1800 이상인지 확인합니다.

Software > Copter Pids 화면에서 CH7 Option을 Save Trim으로 설정하고 “Write Params” 버튼을 누릅니다.
CH7 스위치가 꺼진 상태에서 Stabilize 모드로 헬리콥터를 조종하고 송신기의 롤 및 피치 트림을 사용하여 비행 수준을 유지하십시오.
착륙하고 스로틀을 0으로 설정
롤 및 피치 스틱을 놓고 CH7 스위치를 최소 1초 동안 높게 전환합니다. MP의 Flight Data 화면의 Messages 탭에 "Trim saved"라는 단어가 나타나야 합니다.
송신기 롤 및 피치 트림을 다시 중앙으로 재설정하고 다시 비행하면 이제 수평으로 비행해야 합니다. 3, 4, 5단계를 반복하지 않는 경우
자동 트림
자동 트림을 사용하면 안정적인 호버링에서 비행할 때 롤 및 피치 트림이 캡처됩니다.
무언가에 충돌하지 않고 콥터를 날릴 수 있는 충분한 공간이 있고 바람이 없는 환경을 찾으십시오.
차량을 안정화 모드로 설정
15초 동안 또는 작은 빨간색, 파란색 및 노란색 LED가 주기적 패턴으로 깜박일 때까지 스로틀을 누르고 방향타를 오른쪽으로 누릅니다.
안정적인 호버링에서 약 25초 동안 헬리콥터를 비행하세요.
착륙하고 스로틀을 0에 놓고 몇 초 동안 기다립니다(트림 매개변수가 저장되고 있음).
안정화 모드에서 다시 이륙하고 콥터가 수평으로 비행하는지 확인하십시오.
메모
배터리가 분리된 상태에서 위의 절차가 지상에서 작동하는지 테스트할 수도 있습니다. 자동 조종 장치를 미션 플래너에 연결하고 위의 단계 완료를 시뮬레이션하면서 비행 데이터 화면을 관찰합니다.

메모
AHRS_TRIM_X 및 AHRS_TRIM_Y 를 수정하여 트림을 수동으로 설정할 수 있습니다 . 롤 트림은 AHRS_TRIM_X , 피치 트림은 AHRS_TRIM_Y 입니다 . 두 값 모두 라디안 단위이며 왼쪽 롤과 앞으로 피치는 음수입니다.
입력 없이 콥터가 완전히 움직이지 않도록 모든 드리프트를 제거하는 것은 거의 불가능합니다.
데스크탑 방식
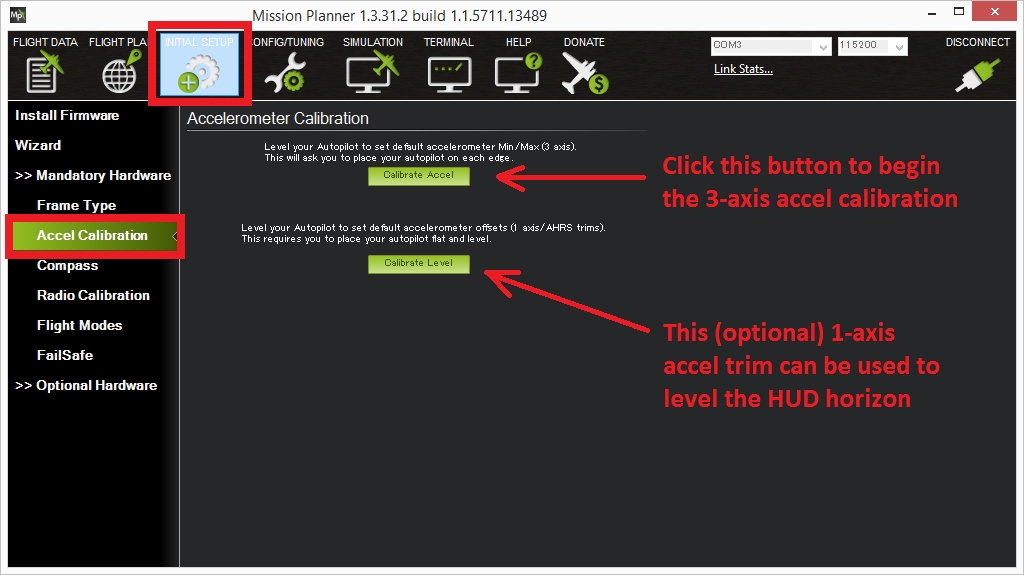
차량 레벨을 설정하고 미션 플래너(또는 다른 지상국)에 연결하고 초기 설정, 필수 하드웨어, 가속 보정을 선택하고 하단의 "레벨 보정" 버튼을 눌러 트림을 업데이트할 수도 있습니다.
비행 컨트롤러가 프레임에서 완벽하게 수평이 되지 않고 모터가 약간 기울어지는 등의 다른 작은 프레임 문제로 인해 차량이 지상에 있는 동안 HUD 수준을 만든다고 해서 반드시 비행하는 동안 수평으로 표류하지 않는다는 의미는 아닙니다.
Last updated