RSSI(수신 신호 강도 표시)

자동 조종 장치에서 RSSI 설정
RSSI는 접을 수 있는 매개변수 세트로 구체적으로 설정할 수 있습니다. 기본적으로 먼저 설정해야 합니다.
RC 수신기의 신호 강도 표시가 자동 조종 장치에 공급되는 방식에 따른 RSSI_TYPE :
값
기능
0
장애가 있는
RSSI가 사용되지 않음
1
아날로그핀
아날로그(ADC) 핀에 공급되는 고정 전압(0 - 3.3 또는 5V)으로 표시되는 신호 강도
2
RCChannelPwm값
전용 채널의 PWM 값으로 표시되는 신호 강도, 선택적으로 합계 신호(cPPM/SBus)에 포함됨
삼
수신기 프로토콜
SUMD 또는 ST24와 같은 전용 수신기 프로토콜을 통해 RSSI 지원
4
PWM입력핀
PWM 유형 RSSI 입력을 읽기 위해 GPIO 핀을 지정할 수 있습니다.
5
원격 측정RadioRSSI
원격 원격 측정 라디오에서 보고되는 신호 강도
RSSI_TYPE을 0이 아닌 값으로 설정한 후에 는 매개변수를 저장하고 새로 고쳐 RSSI 처리를 추가로 지정할 수 있는 하위 매개변수 집합을 해제해야 합니다.
자동 조종 장치에 RSSI를 공급하기 위한 네 가지 기본 옵션이 있습니다.
RSSI_TYPE = 1 전용 핀에 공급되는 아날로그 전압 유형 RSSI
RSSI_ANA_PIN은 RSSI 전압을 읽는 데 사용되는 핀을 지정합니다. 이 매개변수는 현재 cbios 펌웨어를 사용할 때 대부분의 보드에서 올바른 핀 번호로 기본 설정됩니다.
신호가 가장 강할 때 RSSI_PIN_HIGH 전압이 RSSI_ANA_PIN 에 수신됩니다
신호가 가장 약할 때 RSSI_PIN_LOW 전압이 RSSI_ANA_PIN 에 수신됩니다
RSSI_TYPE = 집단 PPM/합계 신호(sBus)에 내장된 2 PWM 채널 유형 RSSI
RSSI_CHANNEL 집합/합 신호가 사용되는 경우(채널 5 이상) 라디오 수신기가 RSSI를 포함하는 데 사용할 채널 번호입니다.
RSSI_CHAN_HIGH PWM 값은 신호가 가장 강할 때 라디오 수신기가 출력합니다.
RSSI_CHAN_LOW PWM 값은 신호가 가장 약할 때 라디오 수신기가 출력합니다.
RSSI_TYPE = 3개의 디지털 수신기 프로토콜의 신호 품질 또는 손실된 패킷 정보(SUMD/ST24/FPort) 내부적으로 확장되며 추가 조정이 필요하지 않습니다.
RSSI_TYPE = 전용 GPIO 핀에 공급되는 4 PWM 유형 RSSI
RSSI_ANA_PIN PWM 유형 RSSI를 읽을 GPIO 핀을 지정합니다. IOMCU가 있는 보드에는 기본적으로 PWM 출력으로 사용하거나 GPIO로 사용하도록 설정할 수 있는 AUX 핀이 있습니다. GPIO를 참조하십시오.
RSSI_CHAN_HIGH PWM 값은 신호가 가장 강할 때 라디오 수신기가 출력합니다.
RSSI_CHAN_LOW PWM 값은 신호가 가장 약할 때 라디오 수신기가 출력합니다.
메모
일부 라디오 수신기는 반전된 RSSI 값(가장 낮은 전압/최고 수신 시 PWM)을 출력하므로 _HIGH 매개변수는 실제로 0 - 100%로 올바른 내부 스케일링을 위해 해당 _LOW 매개변수보다 낮은 값으로 설정될 수 있습니다.
아날로그 전압 유형 RSSI를 읽으려면 RSSI_ANA_PIN을 사용 가능한 모든 무료 ADC 핀으로 설정할 수 있습니다. pixhawk/cube 유형 보드에는 sBus 출력/RSSI 입력 핀(103)이 포함됩니다. 전용 ADC 핀을 사용할 때 해당 핀 번호는 일반적으로 해당 핀에서 사용되는 ADC1 채널과 일치합니다. 자세한 내용은 각 프로세서의 대체 기능 표 에서 DMA1 맵을 참조하십시오 .
MissionPlanner의 HUD에 RC 수신기의 RSSI 값 표시
자동 조종 장치에서 RSSI를 올바르게 설정하면 해당 값이 원격 측정 스트림 내에서 지상국으로 전송되고 GCS에 표시될 수 있습니다. 또한 RC 수신기의 RSSI가 기록되어 온보드 또는 독립형 OSD에 표시될 수 있습니다.
MP의 HUD에 RC 수신기의 RSSI를 표시하려면:
Mission Planner를 열고 자동 조종 장치에 연결
비행 데이터 화면에서 HUD를 마우스 오른쪽 버튼으로 클릭하고 "사용자 항목"을 선택합니다.
표시되는 "Display this" 창에서 "rxrssi"를 체크합니다.

메모
RC 링크의 rssi를 표시하려면 rxrssi를 선택하는 것이 중요하며 항목 rssi 및 remrssi는 무선 모뎀의 접지 및 원격 트랜시버의 신호 강도 표시를 표시하는 데 사용됩니다.
연결 예
다음은 일반적인 RC 수신기 RSSI 연결 체계의 예입니다.
PPM 신호의 채널에 내장된 RSSI
단일 신호 와이어에서 cPPM 또는 sBus 유형 합계 신호를 사용하여 RC 수신기에서 자동 조종 장치로 모든 RC 채널을 공급하는 것이 일반적입니다. EZUHF, OpenLRS, Crossfire 또는 DragonLink와 같은 대부분의 UHF 유형 RC 시스템은 RSSI를 이 집단/합계 신호 스트림 내의 전용 채널에 내장하는 것을 지원합니다. ArduPilot 기본 채널 1-4는 기본 제어(롤, 피치, 스로틀, 요)의 입력으로 사용되므로 4보다 큰 채널 번호는 RSSI를 포함하는 데 사용할 수 있습니다. 일반적으로 이러한 시스템은 GUI를 사용하여 RSSI를 RC 수신기의 전용 채널 슬롯에 할당하거나 기본적으로 표준 채널로 설정합니다. 참조를 위해 해당 시스템의 사용 설명서를 참조하십시오.
자동 조종 장치에 대한 기존 RC 수신기 연결이 있는 경우 임베디드 RSSI를 사용하기 위해 추가 배선이 필요하지 않습니다.

아래 예는 DragonLink RC 수신기에 RSSI를 내장하기 위해 채널 5를 할당하는 방법을 보여줍니다.
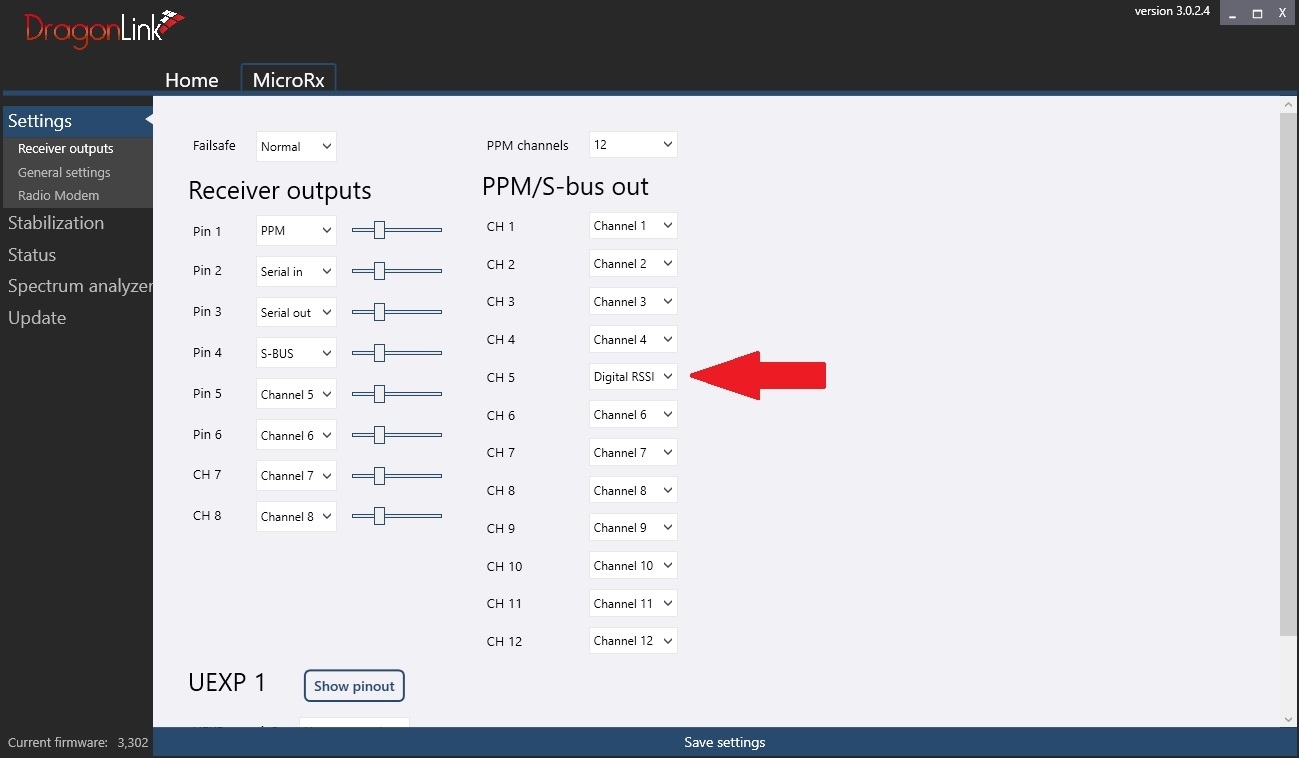
RSSI 값은 신호 핀 1의 PPM 스트림과 핀 4의 sBus 스트림 모두에서 출력됩니다. 둘 중 하나는 자동 조종 장치의 RCInput 핀에 공급될 수 있습니다.
이제 그에 따라 RSSI 매개변수를 설정합니다.
RSSI_TYPE = 2(이전에 기본값 0으로 설정한 경우 매개변수를 다시 로드해야 함)
RSSI_CHANNEL = RC 수신기에 RSSI를 내장하는 데 사용되는 채널(위 예에서 Ch5)
RSSI_CHAN_HIGH = 가장 강한 수신 채널 값
RSSI_CHAN_LOW = 수신이 가장 약한 채널 값
GCS에서 각 RC 채널의 입력 값과 함께 rxssi를 표시하면 0 - 100% RSSI 스케일과 일치하도록 값 범위를 조정하는 데 도움이 됩니다.

가장 강한 수신에서 Ch5는 1904 us의 PWM 값을 보여줍니다. 송신기를 끄면 1093us로 떨어집니다. RSSI_CHAN_HIGH 및 RSSI_CHAN_LOW를 각각 설정하면 사용된 PWM 범위를 최적의 분해능으로 0 - 100%로 확장할 수 있습니다.
메모
특정 sBus 프로토콜 변동으로 인해 수신기 안전 장치 조건 중에 채널 값이 업데이트되지 않을 수 있습니다. 이 경우 안전 장치 중에 마지막으로 유효한 RSSI 값이 표시됩니다. 일반적으로 수신된 신호 강도는 비행 조건에서 점진적으로 감소하므로 부정적인 영향은 없을 것입니다. 그러나 설정 및 테스트 중에 RC 송신기가 실제로 꺼져 있는 동안 비교적 높은 값에서 RSSI가 고정되는 것을 보는 것은 혼란스러울 수 있습니다.
전용 핀에 공급되는 아날로그 전압 유형 RSSI
RC 수신기가 아날로그 전압 범위 유형 RSSI를 출력하는 경우 이를 자동 조종 장치의 아날로그 RSSI 입력 핀에 공급할 수 있습니다. 일반적인 전압 범위는 0 - 3,3V 또는 0 - 5V입니다. 자세한 내용은 RC 시스템 설명서를 참조하거나 멀티미터를 사용하여 확인하십시오.
메모
대부분의 자동조종 장치의 입력 핀은 이론적으로 5V 허용이지만 대부분의 ADC는 더 높은 입력 전압을 축소하기 위한 전압 분배기가 장착되지 않는 한 최대 3,3 - 3,6 V까지만 측정합니다. RC 수신기의 RSSI 전압과 자동 조종 장치의 사양을 확인하여 호환성을 확인하십시오.
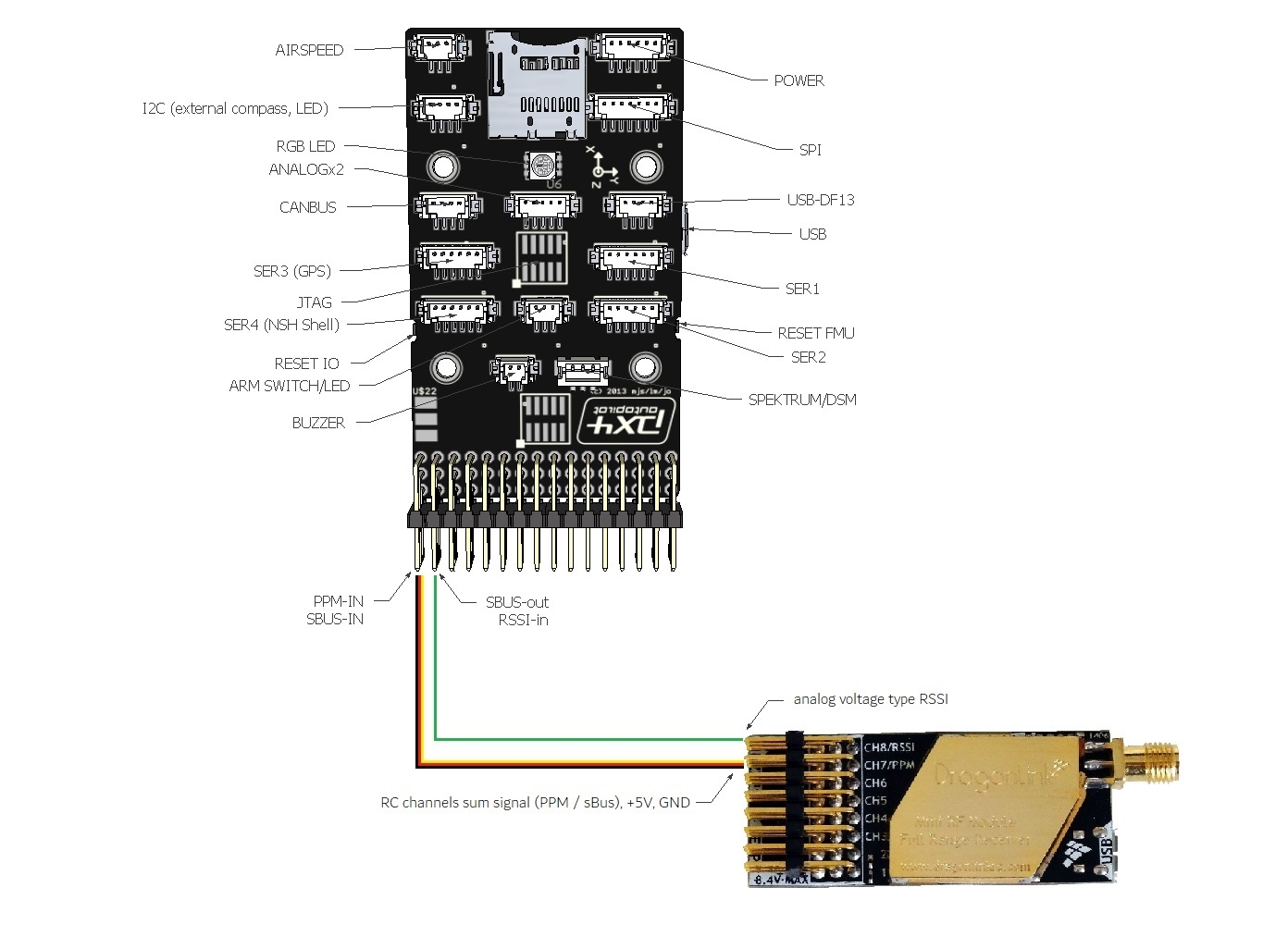
공급 전압과 접지를 포함하는 자동 조종 장치에 대한 기존 RC 수신기 연결이 있는 경우 하나의 추가 신호 와이어만 필요합니다. 아래 예는 수신기의 아날로그 전압 유형 RSSI를 pixhawk 자동 조종 장치의 sBus 출력 핀에 연결하는 방법을 보여줍니다.
이제 그에 따라 RSSI 매개변수를 설정합니다.
RSSI_TYPE = 1(이전에 기본값 0으로 설정한 경우 매개변수를 다시 로드해야 함)
RSSI_ANA_PIN = 103(PixHawk SBUS 출력/RSSI 입력 핀)
RSSI_PIN_HIGH 신호가 가장 강할 때 RSSI_ANA_PIN 에 수신되는 전압
RSSI_PIN_LOW 신호가 가장 약할 때 RSSI_ANA_PIN 에 수신된 전압
메모
RSSI 유형 옵션은 개별 RC 시스템의 사양에 따라 다릅니다. 일부 시스템에는 비표준 독점 프로토콜의 추가 하드웨어 변환 또는 추가 해결 방법이 필요합니다.
전용 핀에 공급되는 PWM 유형 RSSI
RC 수신기가 전용 핀 또는 패드에서 PWM 유형 RSSI를 출력하는 경우 이를 자동 조종 장치의 GPIO 핀 중 하나에 공급할 수 있습니다. PWM 출력 핀을 GPIO로 설정하려면 GPIO를 참조하십시오 . pixahwk 유형 하드웨어에서 이것은 보드의 MCU에 연결되어 IOMCU 보조 프로세서를 우회하는 AUX 핀을 나타냅니다.
HW 핀(AUX) 번호
대체 GPIO 번호
1
50
2
51
삼
52
4
53
5
54
6
55
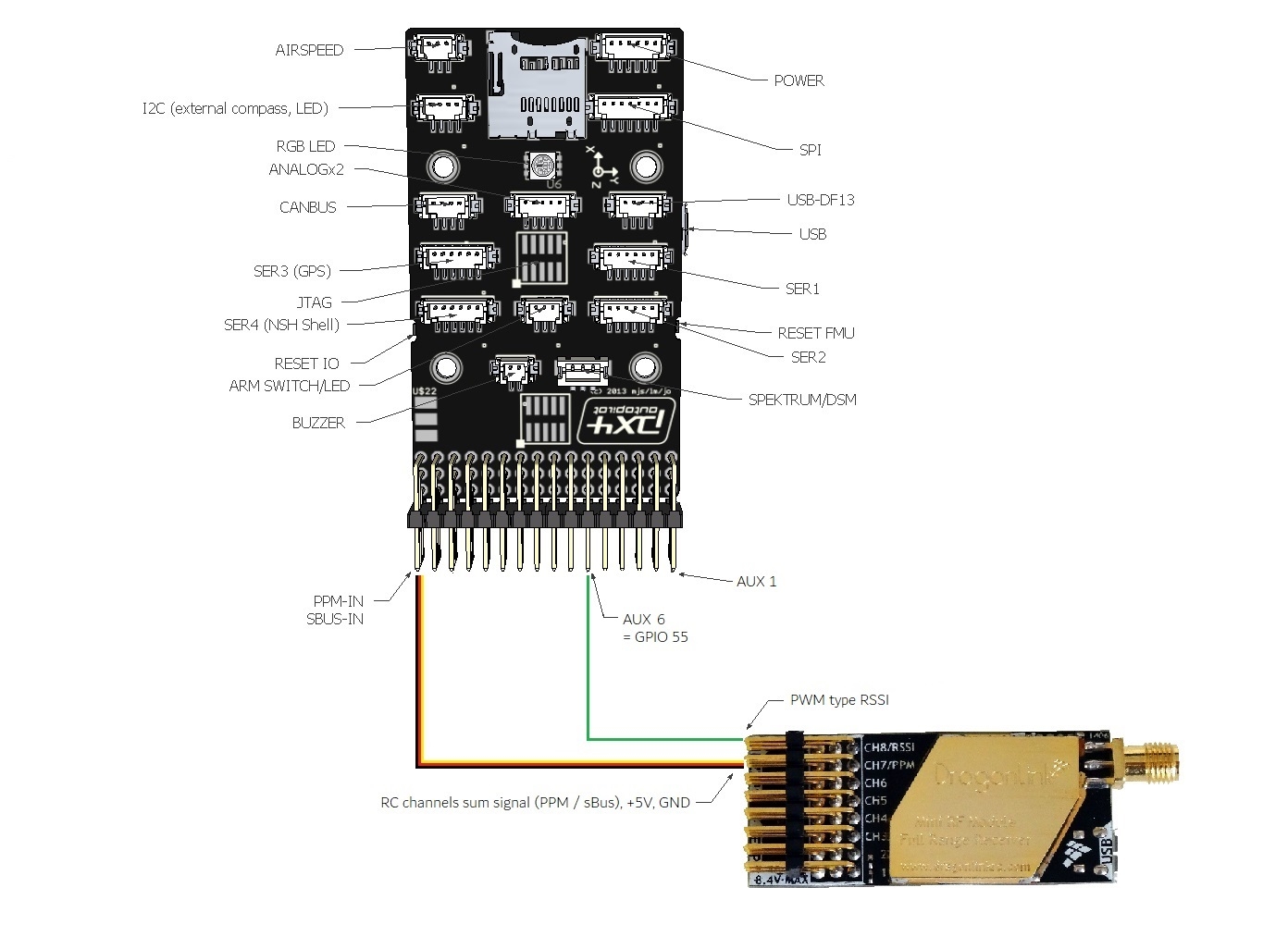
위의 예에서 BRD_PWM_COUNT 4로 설정하면 PWM 출력으로 사용하기 위해 핀 1-4가 설정되고 GPIO 54 및 55로 사용하기 위해 나머지 핀 5 및 6이 해제됩니다.
공급 전압과 접지를 포함하는 자동 조종 장치에 대한 기존 RC 수신기 연결이 있는 경우 하나의 추가 신호 와이어만 필요합니다. 아래 예는 수신기의 PWM 유형 RSSI 출력을 GPIO 55로 사용하기 위해 pixhawk 자동 조종 장치의 AUX 6 핀 세트에 연결하는 방법을 보여줍니다.
이제 그에 따라 RSSI 매개변수를 설정합니다.
RSSI_TYPE = 4(이전에 기본값 0으로 설정한 경우 매개변수를 다시 로드해야 함)
RSSI_ANA_PIN = 사용된 GPIO 핀 번호(위 예에서 55)
RSSI_CHAN_HIGH = 수신 강도가 가장 높을 때의 PWM 값
RSSI_CHAN_LOW = 수신이 가장 약한 PWM 값
특수 사용 사례
비표준 PWM 방식 RSSI를 아날로그 전압으로 변환
일부 FrSky 수신기의 고주파 PWM RSSI와 같은 비표준 RSSI 유형의 경우 RC 필터를 사용하여 신호를 평준화하여 자동 조종 장치의 아날로그 RSSI 입력 핀에 사용할 수 있도록 할 수 있습니다.
4.7k 저항과 10uF 커패시터는 수신기의 RSSI 출력에서 펄스를 걸러내는 데 사용됩니다.

Autopilot에서 RSSI로 사용할 Futaba S.BUS2 "프레임 오류율" 정보를 활용하는 방법
프레임 오류율(FER)은 수신기가 송신기에서 보낸 수신된 데이터 패키지를 디코딩하는 데 문제가 있는지 여부를 나타냅니다. 값은 RSSI와 유사합니다.
FER 정보는 Futaba S.BUS2 데이터 스트림 내에서 구현됩니다. 연속값으로 전송되지 않고 25% 분해능으로 전송됩니다.
하드웨어 설정 방법
Futaba S.BUS2 데이터 스트림 에서 FER을 추출하기 위해 S.BUS2-아날로그 DC 전압 변환기를 사용할 수 있습니다.
Futaba R7008SB 수신기와 추가 S.BUS2 GPS 다중 센서를 사용한 기본 설정이 아래 이미지에 나와 있습니다. 유사한 설정이 Futaba R7003SB 수신기를 사용하여 작동해야 합니다.
메모
Futaba 수신기에서 S.Bus 및 S.Bus2 프로토콜을 활성화하려면 R7008SB 수신기를 "모드 B" 또는 "모드 C" 로 설정 하고 R7003SB 수신기를 "모드 A" 로 설정해야 합니다 . 자세한 내용은 R7008SB 또는 R7003SB 사용자 설명서를 확인하십시오 .

메모
변환기는 최대를 제공하도록 설계되었습니다. 프레임의 100%가 양호할 때 3.3V DC의 전압 출력 및 약. 연결이 끊어졌거나 수신기가 안전 장치 상태일 때 0.4V DC. 최상의 결과를 얻으려면 전압계를 사용하여 "완전 수신" 및 "Tx 꺼짐"에서 변환기의 출력 전압을 보정하는 것이 가장 좋습니다. 일반적으로 컨버터는 다음 DC 전압을 출력해야 합니다.
안전 장치의 Rx –> 최대값의 12%. VDC 출력 ~ 0.4V DC
Rx 수신 <= 25% 양호한 프레임 –> 최대의 34% VDC 출력 ~ 1.1V DC
Rx 수신 <= 50% 양호한 프레임 –> 최대의 56% VDC 출력 ~ 1.85V DC
Rx 수신 <= 75% 양호한 프레임 –> 최대의 78% VDC 출력 ~ 2.6V DC
Rx 수신 <= 100% 양호한 프레임 –> 최대의 100%. VDC 출력 ~ 3.3V DC
Futaba FASSTest Telemetry 가능 송신기에 RSSI 피드백을 설정하는 방법
S.BUS2에서 아날로그로의 변환 외에도 변환기는 FER/RSSI 값을 S.BUS2 데이터 스트림으로 동시에 루프백합니다. 이 기능을 사용하면 FASSTest 원격 측정 가능 송신기 의 모든 사용자가 원격 측정 RSSI 피드백을 옵션으로 설정할 수 있습니다. 또한 수신 신호 품질이 저하될 때 알리도록 청각 및/또는 진동 알람을 설정할 수 있습니다.
이 기능을 사용하려면 송신기에서 "FASSTest-14CH" 프로토콜을 활성화해야 합니다.
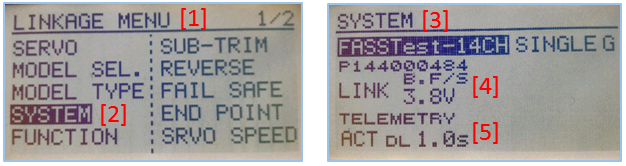
다음 스크린샷은 Futaba T14SG의 설정 절차를 보여줍니다. 다른 FASSTest 지원 송신기는 유사한 방식으로 설정해야 합니다.
"LNK" 버튼[1]을 두 번 클릭하여 "LINKAGE MENU"로 들어갑니다.
"시스템"으로 이동하고 "RTN"[2]을 누릅니다.
“SYSTEM” 메뉴에서 프로토콜 선택 탭으로 이동하여 “FASSTest-14CH” 프로토콜을 선택합니다[3] .
프로토콜을 변경한 경우 결국 수신기를 송신기에 다시 "연결"해야 합니다[4].
TELEMETRY가 "ACT"[5]로 설정되어 있는지 확인합니다.
Futabas 원격 측정 센서는 이름을 바꿀 수 없기 때문에 전송된 FER/RSSI 값은 단순한 "온도 센서" 로 나타납니다 . 반면 "0°C"는 "Rx in failsafe"를 의미하고 "100°C"는 "Rx"를 의미합니다. 받은 <= 100 % 좋은 프레임”.
변환기 는 현재 FER/RSSI 값을 S.Bus2 Telemetry 데이터 스트림의 슬롯 1에 보고합니다.
변환기의 FER/RSSI 피드백을 디코딩하려면 표준 "TEMP125" 센서를 송신기의 슬롯 1에 할당해야 합니다.
"LNK" 버튼을 더블 클릭하여 "LINKAGE MENU"로 들어갑니다.
"S1"[1]을 눌러 메뉴의 2페이지를 표시하고 "SENSOR"로 이동한 다음 "RTN"[2]을 누릅니다.
슬롯 1 탭으로 이동하여 "RTN"[3]을 누릅니다.
"TEMP125" 센서를 선택하고 "RTN"을 두 번 눌러 선택을 확인합니다[4].
이제 슬롯 1에 "TEMP125" 센서를 할당해야 합니다[5]. 그렇다면 “HOME/EXIT” 버튼을 두 번 눌러 메뉴에서 나오십시오.
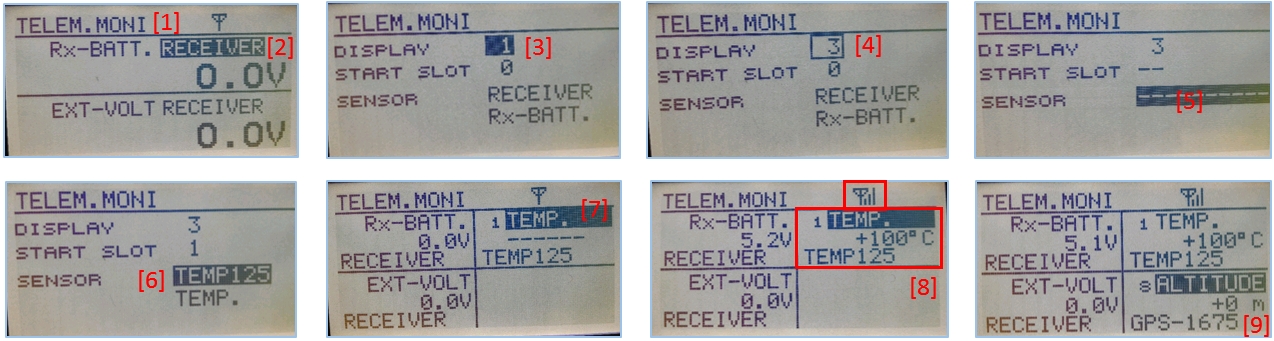
FER/RSSI 값을 표시하고 알람을 트리거하려면 TELEMETRY MONITOR를 구성해야 합니다.

"HOME/EXIT" 버튼 [1]을 눌러 "TELEM.MONI" 메뉴로 들어갑니다.
"RECEIVER"로 이동하여 "RTN" 버튼[2]을 누릅니다.
디스플레이 탭[3]으로 이동하여 "3"[4]을 선택합니다.
"SENSOR"[5]로 이동하여 "TEMP125"[6]를 선택하고 "RTN"으로 확인합니다.
"TELEM.MONI" 디스플레이로 돌아가고 RSSI/FER 값을 "온도"[7]로 보려면 "HOME/EXIT"를 누르십시오.
알람을 설정하려면 "TEMP"[7]로 이동하고 "RTN"을 누릅니다. 알람 설정에 대해서는 Tx 사용 설명서를 참조하십시오.
수신기를 전원에 연결하자마자 FER/RSSI 값과 표준 수신 신호 품질 표시기가 나타납니다[8].
변환기는 슬롯 2에서 슬롯 31까지 할당되는 한 다른 원격 측정 장치와 혼합될 수 있습니다 [9].
Last updated