Kakute H7 비행 컨트롤러
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo

명세서
프로세서
STM32H743 32비트 프로세서
센서
InvenSense MPU6000 IMU(가속 및 자이로 전용, 나침반 없음)
BMP280 기압계
힘
전압 모니터링 기능이 있는 2S - 6S Lipo 입력 전압
비디오 송신기에 전원을 공급하기 위한 9V, 1.5A BEC
인터페이스
9x PWM 출력(9번째 pwm 출력은 LED 패드를 통한 NeoPixel LED 스트링용임)
1x RC 입력
GPS 및 기타 주변 장치용 6x UART/직렬
외부 나침반용 I2C 포트 1개
마이크로 USB 포트
모든 UARTS는 하드웨어 반전을 지원합니다. SBUS, SmartPort 및 기타 역 프로토콜은 "역전 해킹" 없이 모든 UART에서 작동합니다.
로깅용 microSD 카드 슬롯
AT7456E OSD
외부 전류 모니터 입력
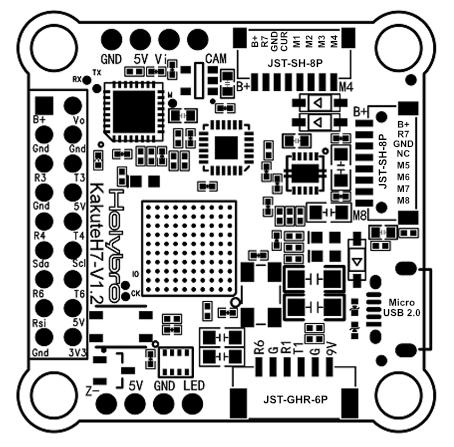
핀아웃
UART 매핑
UART는 위의 핀아웃에서 Rn 및 Tn으로 표시됩니다. Rn 핀은 UARTn의 수신 핀입니다. Tn 핀은 UARTn의 전송 핀입니다.
직렬0 -> USB
SERIAL1 -> UART1(텔렘1)
SERIAL2 -> 외부에서 사용할 수 없음
직렬3 -> UART3(GPS)
직렬4 -> UART4
SERIAL5 -> 사용할 수 없음
SERIAL6 -> UART6(UART6 RX는 일반적으로 BRD_ALT_CONFIG = 1이 아닌 한 RCinput)
SERIAL7 -> UART7(RX7만 사용 가능, 일반적으로 ESC 원격 측정에 사용됨)
SERIAL7 포트(UART7)는 일반적으로 ESC 원격 측정용이며 두 ESC 커넥터 모두에 R7 핀이 있습니다.
서보 출력 매핑
PWM 출력은 위의 핀아웃에 M1-M8로 표시되어 있습니다. 해당 서보 출력은 다음과 같습니다.
M1 -> 서보 출력 4
M2 -> 서보 출력 1
M3 -> 서보 출력 2
M4 -> 서보 출력 3
M5 -> 서보 출력 5
M6 -> 서보 출력 6
M7 -> 서보 출력 7
M8 -> 서보 출력 8
RC 입력
기본적으로 타이머 입력에 매핑되는 R6 핀은 진정한 UART 연결이 필요한 CRSF/ELRS 및 SRXL2를 제외하고 모든 ArduPilot 지원 수신기 프로토콜에 사용할 수 있습니다. 그러나 이러한 방식으로 연결된 FPort는 원격 측정 없이 RC만 제공합니다.
Fport, CRSF 및 SRXL2 수신기에서 CRSF 및 임베디드 원격 측정을 사용할 수 있도록 하려면 R6 핀을 BRD_ALT_CONFIG 를 "1"로 설정하여 양방향 시스템에서 사용하기 위한 진정한 UART RX 핀으로 사용하도록 구성할 수도 있습니다. SERIAL6 포트의 RX 입력 핀.
이 옵션을 사용하면 SERIAL6_PROTOCOL을 "23"으로 설정해야 합니다.
PPM은 지원되지 않습니다.
SBUS/DSM/SRXL은 R6 핀에 연결되지만 SBUS는 SERIAL6_OPTIONS를 "3"으로 설정해야 합니다.
FPort는 T6에 대한 연결이 필요하고 SERIAL6_OPTIONS는 “7”로 설정되어야 합니다.
CRSF도 R6 외에 T6 연결이 필요하며 자동으로 원격 측정을 제공합니다. SERIAL6_OPTIONS를 "0"으로 설정합니다 .
SRXL2는 T6에 대한 연결이 필요하며 자동으로 원격 측정을 제공합니다. SERIAL6_OPTIONS를 "4"로 설정합니다 .
모든 UART는 ArduPilot의 RC 시스템 연결에도 사용할 수 있으며 PPM을 제외한 모든 프로토콜과 호환됩니다. 자세한 내용은 무선 제어 시스템을 참조하십시오 .
FrSky 텔레메트리
FrSky Telemetry는 SERIAL6/UART6을 포함한 모든 UART의 Tx 핀을 사용하여 지원됩니다. FrSky S.PORT(예: SERIAL6)에 대한 지원을 활성화하려면 다음 매개변수를 설정해야 합니다. 이것은 RC 입력이 기본값( BRD_ALT_CONFIG = 0)을 사용하고 있다고 가정합니다. 분명히, 전이중 RC 프로토콜에 대해 BRD_ALT_CONFIG = 1을 사용하는 경우 FrSky Telemetry에 대해 다른 UART를 사용해야 합니다.
OSD 지원
KakuteH7은 OSD_TYPE 1(MAX7456 드라이버)을 사용하여 OSD를 지원합니다.
PWM 출력
KakuteH7은 최대 8개의 PWM 출력을 지원합니다. 출력은 2개의 JST-SH 커넥터를 통해 사용할 수 있습니다. 8개의 모든 출력은 DShot과 모든 PWM 유형을 지원합니다.
PWM은 3개 그룹으로 나뉩니다.
그룹 1의 PWM 1, 2
그룹 2의 PWM 3, 4
그룹 3의 PWM 5, 6
그룹 4의 PWM 7, 8
동일한 그룹 내의 채널은 PWM이든 Dshot이든 동일한 출력 속도를 사용해야 합니다. 그룹의 채널이 DShot을 사용하는 경우 그룹의 모든 채널이 DShot을 사용해야 합니다.
LED 출력
LED 출력은 기본적으로 NeoPixel LED 문자열을 지원하도록 구성됩니다 .
배터리 모니터링
보드에는 B+ 핀을 통한 내장형 전압 센서가 있지만 내부 전류 센서는 없습니다. 외부 전류 센서를 CUR 핀에 연결할 수 있습니다. 내부 전압 및 외부 전류 모니터링을 위한 기본 매개변수는 모든 Holybro Tekko32 F4 4in1 ESC와 함께 사용할 수 있도록 기본적으로 아래로 설정됩니다.
올바른 배터리 설정 매개변수는 다음과 같습니다.
BATT_모니터 4
BATT_AMP_PERVLT 59.5
나침반
KakuteH7에는 내장 나침반이 없지만 SDA 및 SCL 패드의 I2C를 사용하여 외부 나침반을 연결할 수 있습니다.
펌웨어
이 보드의 펌웨어는 여기 "KakuteH7"이라는 하위 폴더에서 찾을 수 있습니다 .
펌웨어 로드
부트로더 버튼을 누른 상태에서 USB를 연결하여 DFU로 초기 펌웨어 로드를 수행할 수 있습니다. 그런 다음 선호하는 DFU 로딩 도구를 사용하여 "~with_bl.hex" 펌웨어를 로드해야 합니다.
초기 펌웨어가 로드되면 ArduPilot 지상 스테이션 소프트웨어를 사용하여 펌웨어를 업데이트할 수 있습니다. 나중에 업데이트는 *.apj 펌웨어 파일로 수행해야 합니다.
Last updated